

Los últimos años, especialmente desde que Rusia iniciase la invasión de Ucrania, han estado protagonizados en el apartado militar por el desarrollo de la drónica, especialmente en lo relativo a los drones de las clases I y II. Dentro de estas clases, a pesar de que buena parte del protagonismo ha recaído en los drones micro y mini, de lejos los más empleados en términos numéricos, también han vivido su propia revolución los aparatos de las categorías superiores, utilizados para tareas de observación y reconocimiento, de ataque o como señuelos entre otras funciones. Además, es en este nicho en particular donde se han dado pasos firmes hacia la constitución de enjambres de drones (“drone swarm”) que permiten lograr un enorme salto cualitativo al combinar autonomía, inteligencia colectiva y resiliencia en un sistema altamente adaptable.
Índice
- Introducción
- Enjambres de drones Vs manadas de drones
- Tecnología de enjambres de drones en España
- Los enjambres de drones al ataque: una historia real de la guerra de Ucrania
- Desafíos y retos futuros de los enjambres de drones
- Conclusiones
- Notas
Introducción
La drónica militar, entendida como el uso de vehículos aéreos no tripulados (UAV, por sus siglas en inglés) en operaciones bélicas, ha tenido un impacto notable en la guerra contemporánea, particularmente desde los ataques del 11 de septiembre, cuando los Estados Unidos, a lo largo de lo que se daría en llamar el proceso de “Transformación”, vieron en estos aparatos una herramienta muy útil para minimizar bajas propias y ajenas y ahorrar tiempo y dinero.
Así, desde sus rudimentarios orígenes en la primera parte del siglo XX hasta su papel central en los conflictos del siglo XXI, los aparatos y los instrumentos transportados, así como la doctrina de empleo han evolucionado sobremanera, pasando de ser herramientas experimentales a sistemas sofisticados capaces de llevar a cabo tareas de vigilancia, ataque, recolección de datos, guerra electrónica o incluso de hacer de relé de comunicaciones o de transporte logístico.
La historia de la drónica, sin embargo, es muy anterior. Sin necesidad de retrotraernos a griegos y egipcios, que ya hicieron algunos intentos por crear ingenios mecánicos más o menos complejos, o a los autómatas de Vaucanson o Jaquet-Droz, ni a los esfuerzos, durante la Primera Guerra Mundial, de diversos visionarios por controlar remotamente algunos aviones, tanques y torpedos (Elmer Wickersham, Adolphe Kegresse…) aprovechando entre otros los avances logrados por el ingeniero español Leonardo Torres Quevedo con su Telekino, podemos considerar que la historia operativa de los primeros sistemas autónomos se remonta a la Segunda Guerra Mundial. Las V1 y V2, por ejemplo, ya utilizaban un sistema de guiado automatizado, dotado de giróscopos y acelerómetros. Ahora bien, pese a lo mucho que se ha fabulado sobre ellos, no dejan de ser sistemas muy simples que, eso sí, sirvieron a los ingenieros estadounidenses y soviéticos de punto de partida para nuevos desarrollos.
Sería en la Guerra Fría cuando el desarrollo de lo que conocemos como “drones” comenzase a dar como resultado diseños que todavía hoy podemos reconocer como tales. Fue en este escenario en donde los avances que se habían ido produciendo durante las décadas previas en diversos campos (robótica, informática, aeronáutica, nuevos materiales…) confluyeron para alumbrar una serie de sistemas que se pusieron a prueba en conflictos como el de Vietnam. De esta forma, para 1960, la archiconocida DARPA (Defense Advanced Research Projects Agency) estadounidense desarrolló el UGV Shakey, un robot dotado de un sistema de navegación computerizado, de sensores inerciales y de cámara de vídeo. Para 1962 Ryan Aeronautical (ahora propiedad de Northrop Grumman) desarrolló su Model 147, un drone de reconocimiento utilizado poco después sobre China y Vietnam y que dio lugar a diversas variantes empleadas con bastante éxito (se cuentan 3.435 misiones) hasta 1975.
La década de 1980, por su parte, llegó repleta de avances en electrónica, sensores y sistemas de comunicación, impulsando la drónica militar gracias en buena medida a los efectos de la Segunda Estrategia de Compensación estadounidense y su impacto sobre la tecnología militar, pero también a los progresos en otras partes del mundo. En concreto cabe hablar de Israel, país pionero en este campo que desplegó el IAI Pioneer en 1982 durante la Guerra del Líbano. Este dron proporcionó inteligencia en tiempo real, permitiendo a las fuerzas israelíes localizar y destruir posiciones sirias con precisión. Es más, el éxito del Pioneer llevó a Estados Unidos a adquirirlo, consolidando el papel de los drones en operaciones militares modernas.
Ya 1995, el General Atomics MQ-1 Predator marcó un punto de inflexión. Introducido por Estados Unidos, el Predator no solo realizaba misiones de vigilancia, sino que, a partir de 2001, fue equipado con misiles Hellfire, convirtiéndose en el primer dron armado de la historia y siendo utilizado con profusión en Afganistán contra los talibanes. Este avance transformó los UAV de herramientas pasivas a plataformas de ataque, capaces de identificar y eliminar objetivos en una sola misión. Su debut en combate ocurrió en 1999 durante la Guerra de Kosovo, donde se utilizó para llevar a cabo tareas de vigilancia en apoyo a las fuerzas de la OTAN.
Posteriormente, ya en 2007, este mismo país introdujo el MQ-9 Reaper, una versión mejorada del Predator con mayor capacidad de carga, alcance y autonomía que terminó por convertirse en la columna vertebral de las operaciones contra objetivos en puntos como Irak, Siria y Pakistán. En paralelo, como no podía ser de otra forma, distintos países comenzaron a desarrollar sus propios programas de drones. China presentó el CH-, Rusia se interesó por los productos israelíes mientras intentaba desarrollar una industria propia, Turquía desarrolló el Bayraktar TB2… en un suma y sigue constante que no ha hecho más que empezar.
Precisamente, como nuestros lectores saben, el Bayraktar TB2 se convirtió en un ícono en conflictos como el de Nagorno-Karabaj (2020), donde Azerbaiyán lo utilizó para destruir tanques y defensas armenias con precisión quirúrgica. Este conflicto demostró cómo los drones, tanto de esta categoría como en la más difusa de municiones merodeadoras, podían alterar el equilibrio de poder en guerras convencionales, ofreciendo ventajas tácticas a ejércitos con recursos limitados.
Ha sido sin embargo la guerra de Ucrania la que se ha constituido en el mayor laboratorio militar de los últimos tiempos, algo que aplica especialmente al caso de la drónica. No en vano, ha sido y es el contexto en el que se han probado desde sistemas de ataque terminal autónomos a numerosas contramedidas y desde sistemas de filoguiado -muy en boga en los últimos meses- a los primeros enjambres de drones que cabe considerar como tales y que han tenido aplicación real en el campo de batalla.
Enjambres de drones Vs manadas de drones
Antes de entrar en más detalles, es imprescindible que el lector entienda la diferencia entre un verdadero “enjambre” de drones y otros conceptos o denominaciones que suelen emplearse, como “manada” de drones o “grupo” de drones.
En este sentido, aunque es cierto que los enjambres están lejos de llegar a su máximo desarrollo potencial, siendo en ciertos aspectos una tecnología todavía por explorar, cabe decir que sus posibilidades son mucho mayores que las de los grupos o manadas de drones, que se han empleado en escenarios como el ucraniano. La diferencia fundamental es que un enjambre de drones emplea la inteligencia artificial para operar (en lo posible, como veremos) de manera coordinada y autónoma, inspirándose (de ahí el nombre) en comportamientos observados en la naturaleza, caso de los insectos (abejas, hormigas) o aves (estorninos).
El ejemplo, aunque es un tanto pobre, es ilustrativo. En las “inteligencias colmena”, como las hormigas o las abejas, se utilizan señales químicas para establecer el patrón de comportamiento de los individuos, que por lo demás obedece a razones aleatorias. Es decir, que las hormigas exploradoras avanzan en todas direcciones, dejando tras de sí un reguero químico que puede ser seguido por las trabajadoras hasta la comida o cualquier otro material de interés. Sin embargo, dentro del grupo cada individuo ignora por completo las razones por las que hace lo que hace y, en conjunto, tampoco hay ningún tipo de consciencia sobre el propósito. Es una forma de proceder apasionante, pero que en el fondo no es más que una adaptación evolutiva que permite solventar, de una forma muy particular y exitosa, la cuestión de la supervivencia. En el caso de los estorninos y otras aves (o bancos de peces), lo más reseñable es la habilidad que cada integrante de una bandada tiene a la hora de responder en una fracción de segundo al movimiento de todos los demás miembros que evolucionan a su alrededor, adaptando su velocidad y trayectoria para no chocar y, además, de forma que el conjunto mantenga el rumbo marcado por los líderes.
Son, en cualquier caso, sólo algunos de los comportamientos que se intentan replicar, por explicarlo muy sencillamente, con los enjambres de drones aéreos o, cada vez más, de varios tipos (UGV, USV, UAV…) a un tiempo. Para ello se utilizan algoritmos de inteligencia artificial que permiten que cada aparato mantenga el rumbo sin entrar en colisión, pero también que cada uno lleve a cabo sus tareas específicas y que todos obedezcan en todo momento al propósito de la misión. Para ello, es necesario combinar: 1) cierto grado de autonomía, de forma que cada dron procese información del entorno y de otros drones, ajustando su comportamiento en tiempo real y; 2) un notable grado de coordinación, tanto más importante cuanto mayor es el número de aparatos o más compleja la tarea a realizar (SEAD/DEAD, ISTAR + Ataque, etc.).
Por el contrario, los términos «manada» o «grupo» de drones suelen emplearse de forma genérica para describir varios drones que operan juntos, pero sin el nivel de coordinación autónoma o inteligencia colectiva que caracteriza a un enjambre. Estos términos son menos técnicos y pueden variar según el contexto. De hecho, en la mayor parte de los casos estos grupos suelen estar controlados por tantos operadores humanos como aparatos tiene el conjunto, o bien lo hacen de forma que apenas se produce ninguna interacción autónoma entre ellos. De este modo, cuando existe, la coordinación es básica y está preprogramada o bien dirigida manualmente. Esto es lo que ocurre, sin ir más lejos, cuando un conjunto de drones (que puede sumar cientos o miles de integrantes) vuela en formación para un espectáculo, pero cada uno sigue instrucciones específicas sin adaptarse dinámicamente a los demás, pese a lo cual son capaces de formar espectaculares figuras en el aire.
La cuestión de la autonomía es particularmente interesante por un segundo motivo, ya que cada vez es más necesaria no sólo para que los aparatos puedan volar de forma adaptativa (cambiando su trayectoria a partir de los movimientos del resto), sino también para que “decidan” sobre la mejor forma de ejecutar una misión y, llegado el caso, incluso sobre si llevar o no a cabo el ataque final. Por lo general, en estos casos se habla de tres modelos de autonomía o niveles en función de la participación o no de seres humanos en el proceso de decisión:
- Human-in-the-Loop: Es lo que ocurre con los drones o armas que requieren de la participación humana tanto para seleccionar los objetivos como para, llegado el caso, atacarlos. Este sería el caso más básico de un UGV (Unmanned Ground Vehicle) dotado de un arma como pueda ser una ametralladora de 12,70, pero sin ninguna capacidad en cuanto a IA que le permita distinguir posibles objetivos, poder que queda en manos de su operador. O de un FPV filoguiado que es controlado hasta el último momento a través del cable de fibra óptica. Es también el caso de los robots utilizados por los equipos de desactivación de explosivos, aparatos que permiten manejar los bultos sospechosos sin poner en peligro vidas, pero obedecen en todo momento a las órdenes del TEDAX a sus mandos.
- Human-on-the-Loop: Sistemas capaces de discriminar objetivos, fijarlos e incluso atacarlos por sí mismos pero que, en todo momento, se encuentran bajo supervisión humana, de tal forma que un operador puede intervenir sobre las decisiones que toma el sistema, corrigiendo posibles errores, si lo considera necesario. Es el caso más común y en él podemos englobar desde los drones de observación y ataque (como el MQ-9 Reaper) o UGVs armados (como el TheMIS) a la mayoría de FPVs, incluso cuando se les han implementado sistemas de guiado terminar para corregir la trayectoria hasta el objetivo en los últimos metros para maximizar las oportunidades de impacto.
- Human-out-of-the-Loop: Este último caso es el que todos entendemos por sistema autónomo, aunque como vemos la cuestión no es tan simple. Se trata de sistemas de armas que no están sujetos a control humano y que, por tanto, dependen únicamente de su programación y de la sensibilidad de sus sistemas para encontrar objetivos, seleccionarlos, establecer el orden del ataque y, en su caso, proceder a él. Por el momento, aunque existe la posibilidad técnica, no se han implementado por completo. Sí de forma parcial, como ocurre en algunos casos en Ucrania con los drones de largo alcance. Estos, en ocasiones, además de a los sistemas de guiado inercial o por satélite (que pueden ser denegados o perturbados) equipan cámaras y una base de datos para cotejar la información captada sobre el objetivo con sus propios archivos, concluyendo que es el correcto antes de impactar contra él. Sin embargo, no se trata de un Human-out-of-the-loop completo en el sentido de que el ser humano planifica la misión, supervisa hasta donde es posible (más tarde veremos cómo funciona en la práctica) y, en cualquier caso, toma todas las medidas posibles para que el aparato no impacte voluntariamente contra nada que no sea aquel objetivo que tiene preprogramado. Es decir, que el dron, en principio, es incapaz de elegir motu proprio un objetivo.
Tecnología de enjambres de drones en España
Al hablar de enjambres de drones en España y de tecnologías relacionadas con ellos, es obligado tocar el caso de UAV Navigation. Esta empresa, que forma parte de Grupo Oesía (la cual también tiene experiencia previa en drones, un tema tratado en su día en estas mismas páginas), ha desarrollado el grueso de su actividad, iniciada en 2004, centrándose en el diseño de soluciones de guiado, navegación y control para RPAS/UAV. Además, de unos años a esta parte, ha venido haciendo un esfuerzo creciente -tanto humano, como económico- de cara a desarrollar tecnologías de control de enjambres de drones.
La empresa madrileña, en la que trabajan más de cincuenta ingenieros, ha logrado así desarrollar una serie de soluciones específicas para abordar los desafíos técnicos y operativos asociados con esta tecnología. En particular, autopilotos y sistemas de control de vuelo que permiten a los drones operar de manera autónoma y coordinada en entornos complejos, incluso en aquellos escenarios donde la navegación GNSS no es posible debido a la acción de los sistemas de guerra electrónico enemigos, así como un software de control específico que ya ha sido empleado con éxito por clientes extranjeros.
En el caso de los autopilotos, integran sistemas de referencia de actitud y rumbo (AHRS), algoritmos de control de vuelo, y capacidades de fusión de datos de múltiples sensores, lo que permite a los UAV (aeronaves no tripuladas) mantener una navegación precisa y coordinada en prácticamente cualquier condición ambiental o electromagnética. Para ello, recurren a tecnologías de navegación alternativa que aseguran la continuidad de la misión incluso bajo ataques de distinto tipo, como el meaconing, el jamming, la intrusión o las interferencias. La cuestión no es baladí, toda vez que la Federación Rusa, a pesar de ciertas dudas al respecto en los primeros meses de guerra (especialmente respecto a lo que se creía antes de iniciada la invasión), ha desplegado con el tiempo amplias y consistentes capacidades de guerra electrónica.
Por otra parte, los autopilotos de UAV Navigation-Grupo Oesía también habilitan operaciones colaborativas entre aeronaves tripuladas y no tripuladas (Manned-Unmanned Teaming, MUM-T) y operaciones de enjambre, habiendo demostrado en múltiples ocasiones su capacidad para coordinarse con múltiples drones en tiempo real. Una funcionalidad que, como se ha explicado, resulta crítica en misiones que requieren que los drones compartan datos, ajusten trayectorias y eviten colisiones mientras se persigue un objetivo.
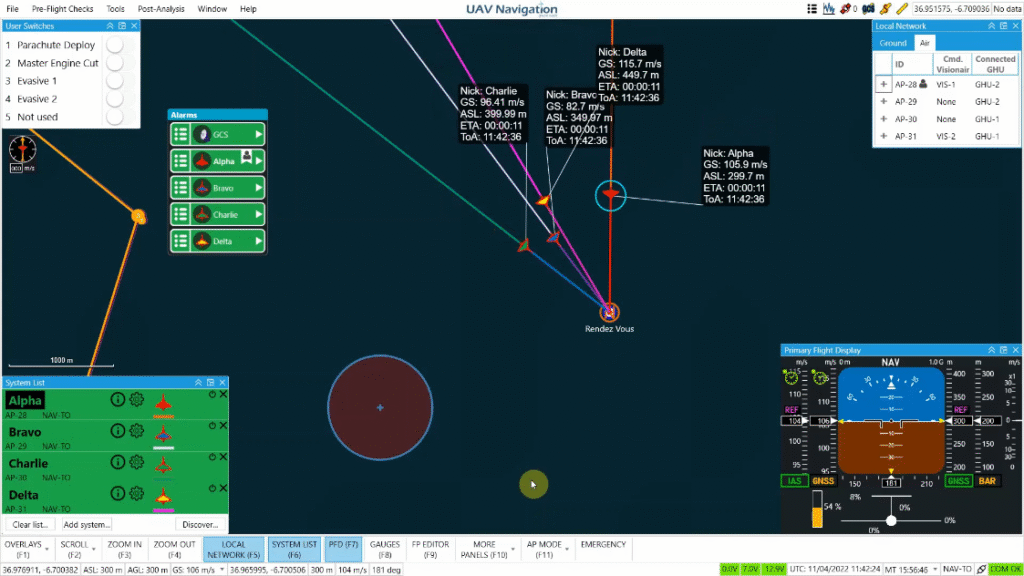
En el caso del software, UAV Navigation-Grupo Oesía ofrece Visionair, una solución pensada para ser empleada por las estaciones de comando y control, tanto terrestres (GCS) como embarcadas en aeronaves nodriza tripuladas que permite configurar, planificar, y ejecutar misiones de UAVs, llevando a cabo operaciones en enjambre. Visionair simplifica la gestión de múltiples drones al proporcionar una interfaz unificada desde la cual un solo operador puede supervisar y coordinar el enjambre, incidiendo únicamente sobre el aparato líder, aunque tiene también acceso al control de todos los integrantes. Además, este software tiene la ventaja de que no sólo permite gestionar enjambres formados por un único modelo de dron, sino también aquellos constituido por distintos tipos de drones aéreos o, más significativo si cabe, enjambres formados por aparatos que operan en diferentes dominios, como el terrestre o el marítimo. Para ello, el software diseñado por UAV Navigation-Grupo Oesía soporta la coordinación en tiempo real, el seguimiento dinámico de objetivos, y la optimización en la ejecución de misiones, lo que reduce la carga operativa y mejora la eficiencia en el empleo de los recursos, desde los propios drones al ancho de banda, el tamaño del equipo necesario para planificar y ejecutar la misión y, por supuesto, el tiempo. El software de gestión de la misión, Visionair, se encarga de conseguir que todos los aparatos que forman el enjambre aguarden en sus áreas de espera, vuelen en coordinación, superen las zonas de denegación de acceso enemigas o busquen rutas alternativas cuando el peligro es excesivo y acometan la búsqueda y destrucción del objetivo marcado. Para ello, en la fase final permite que los drones que forman el enjambre adopten diversas formaciones y coordinen el momento de caer sobre el enemigo, de forma que se maximicen las oportunidades de saturar su última capa de defensa.
Cabe decir que, aunque esta sea una publicación que cubre temáticas relacionadas con la defensa, tanto los autopilotos como el software de UAV Navigation-Grupo Oesía tienen una clara aplicación dual. Es cierto que los enjambres de drones son una herramienta poderosa para misiones de reconocimiento, vigilancia, y operaciones ofensivas, sí. Por supuesto, la capacidad de los drones para trabajar juntos permite una mejor identificación de objetivos y recolección de datos, proporcionando una ventaja táctica. Ahora bien, estas mismas capacidades se pueden utilizar en campos tan diversos como:
- Búsqueda y rescate: En situaciones de desastres naturales, los enjambres de drones pueden cubrir grandes áreas rápidamente, localizar sobrevivientes, y transmitir información a los equipos de primeros auxilios.
- Agricultura: Los enjambres de drones permiten hacer un seguimiento óptimo de la salud de los cultivos, aplicar fertilizantes o pesticidas con precisión, y optimizar los rendimientos agrícolas. Las soluciones de UAV Navigation-Grupo Oesía facilitan la coordinación de múltiples drones para cubrir grandes extensiones de terreno de manera eficiente, reduciendo el impacto ambiental.
- Medio ambiente: Los enjambres de drones equipados con los sensores adecuados sirven para supervisar poblaciones de vida silvestre, rastrear la deforestación, o proporcionar datos en tiempo real con los que combatir incendios forestales.
Alumbrar una serie de productos como los autopilotos o el software Visionair, que están en uso con múltiples clientes en buena parte del mundo y que han acumulado una notable experiencia operativa real, no ha sido tarea sencilla.
Para conseguirlo, la empresa ha tenido que desarrollar algoritmos de coordinación que permitan a los drones compartir datos en tiempo real en una comunicación vehículo a vehículo (V2V) eficiente que permite mantener la cohesión del enjambre, evitando colisiones y optimizando las trayectorias de vuelo.
Por supuesto, han tenido que asegurarse de que sus sistemas cumplan con normativas estrictas y estrictos estándares de seguridad aeronáutica, como son la certificación STANAG 4703, el certificado LUC de EASA, o los estándares americanos MIL-STD 810F y MIL-STD-461F que garantizan la robustez y la fiabilidad de sus sistemas.
Por otra parte, han implementado mejoras en el sistema para prevenir todas las posibles vulnerabilidades que pueden suceder en operaciones UAS avanzadas, por ejemplo, implementando medidas para proteger los enjambres de drones contra amenazas cibernéticas, como el secuestro de señales o las interferencias.
Un trabajo que no ha terminado, sino que está en pleno apogeo, mientras la empresa trabaja en perfeccionar sus algoritmos; en mejorar la capacidad de integración de sistemas heterogéneos (combinando drones aéreos con vehículos terrestres o submarinos) o; en aumentar el número de aparatos que pueden formar parte de un enjambre (actualmente hablan de hasta 32 elementos).
Los enjambres de drones al ataque: una historia real de la guerra de Ucrania
Ucrania, febrero de 2025. Dos docenas de drones de distintos tipos son lanzados prácticamente al mismo tiempo desde diversas localizaciones al este del río Dniéper, en algunos casos separadas entre sí por decenas e incluso cientos de kilómetros. Van a participar en una misión hasta cierto punto rutinaria, pero que ha requerido de semanas de planeamiento antes de poder ejecutarse. Su objetivo: atacar la infraestructura rusa relacionada con los hidrocarburos, batiendo la estación de bombeo de Kropotkinskaya[1] y la refinería de Ilsky[2], ambas situadas en el Krai de Krasnodar: dos más de las decenas de objetivos que han sido blanco de las armas de largo alcance ucranianas desde unos meses atrás. Resultado: diversas explosiones sacuden ambas instalaciones[3] [4], complicando sobremanera la producción y flujo de hidrocarburos rusos, fundamentales para financiar la invasión de su vecino.
En principio, el lector podría pensar que cuando hablamos de una acción rutinaria, esta consiste en el mero lanzamiento de drones contra un objetivo cuyas coordenadas han sido previamente programadas en los aparatos a emplear y que, tras un vuelo más o menos lineal y monótono, aquellos que lograron evadir los sistemas antiaéreos rusos, hicieron impacto causando diversos daños. Nada más lejos de la realidad.
Cualquiera de las operaciones “rutinarias” de lanzamiento de drones o misiles por parte de Ucrania contra Rusia (y podría decirse lo mismo del lado contrario, aunque con ciertas salvaguardas) ha necesitado antes de una meticulosa preparación. Además, habría sido imposible sin el empleo de herramientas a la vanguardia de la tecnología, desde los propios drones implicados, al software, las redes de comunicaciones o los sistemas de guiado, amén de la Inteligencia Artificial utilizada para el vuelo autónomo o el guiado terminal hasta el objetivo (que, aunque no suela admitirse no necesita de humanos como parte del proceso). El software de control, de hecho, es fundamental.
En primer lugar, los encargados de la selección de objetivos deben repasar todos los datos de inteligencia disponibles, desde fuentes OSINT como Google Maps a imágenes por satélite de pago como las que proporcionan empresas como Maxar. También la inteligencia de fuentes cerradas que suministran sus aliados y que procede de sus propios satélites o aviones de reconocimiento. Incluso la clásica inteligencia humana (HUMINT), la prensa y cualquier otro medio que podamos imaginar es escrutado en busca de información valiosa acerca de posibles objetivos. Hay que pensar que por mucho que el coste de los drones haya descendido, siguen siendo siempre escasos en relación con las necesidades. Además, errores en la selección de objetivos podrían dar al traste con toda la operación e incluso poner en riesgo a sus partícipes, por no hablar del coste en términos de imagen si llegasen a producirse daños colaterales significativos; algo que Rusia explotaría en su beneficio a través de las redes sociales y los medios de comunicación afines, buscando así cuestionar el relato ucraniano.
En segundo lugar, una vez el objetivo u objetivos están claros, hay que trabajar en la identificación de los posibles obstáculos, como los que suponen los sistemas de defensa aérea rusos y, especialmente, los sistemas de guerra electrónica dedicados a negar las comunicaciones de los drones ucranianos, cuando no directamente a abatirlos al interferir sus sistemas. En este sentido, en la jerga militar suele hablarse de un “telón” o barrera de unos 20 kilómetros de profundidad tras la línea de frente que cualquier sistema que pretenda golpear en el interior del territorio ruso, deberá superar. Es aquí cuando el asunto comienza a complicarse, pues o bien se realizan operaciones SEAD/DEAD previas al ataque, forzando la creación de pasillos viables a través del “telón”, o bien se buscan las vulnerabilidades en el mismo, que siempre las hay.
(Continúa…) Estimado lector, este artículo es exclusivo para usuarios de pago. Si desea acceder al texto completo, puede suscribirse a Revista Ejércitos aprovechando nuestra oferta para nuevos suscriptores a través del siguiente enlace.
IMPORTANTE: Las opiniones recogidas en los artículos pertenecen única y exclusivamente al autor y no son en modo alguna representativas de la posición de Ejércitos – Revista digital sobre Defensa, Armamento y Fuerzas Armadas, un medio que está abierto a todo tipo de sensibilidades y criterios, que nace para fomentar el debate sobre Defensa y que siempre está dispuesto a dar cabida a nuevos puntos de vista siempre que estén bien argumentados y cumplan con nuestros requisitos editoriales.
Be the first to comment