
The LISS program is the latest great innovation from the Spanish company Escribano Mechanical & Engineering. It is an autonomous and distributed drone swarm system designed to tackle very diverse missions, from ISR/ISTAR to ground attack, border control, spills or forest fires, damage assessment or location of victims of shipwrecks or natural disasters, among others. It is a pioneering project, which has the support of the DGAM and, if it really fulfills what was announced, it will be a commercial success and will mark a before and after for the Spanish defense industry. Furthermore, it will place Spain within the exclusive group of countries capable of developing this type of technologies. A select club of which no other member state of the European Union is yet a part.
On more than one occasion we have referred in these pages to the «RMA of Information», born largely as a consequence of the American "Second Compensation Strategy", launched after the departure of Vietnam. Indeed, after the setback suffered in said war, it was concluded that it was necessary to start a new investment cycle that would allow for the birth of new technologies capable of counteracting the Soviet superiority in conventional means in theaters such as the European one. Furthermore, the availability of new weapons and platforms would allow the North American military to overcome the trauma suffered, which had affected the morale of the collective and undermined confidence in the institution. In this way, taking advantage of the possibilities opened up by the latest scientific discoveries, especially those related to cybernetics, the North American military-industrial complex was able to develop new and surprising equipment whose launch we witnessed in the Gulf War.
Now, the question is not so simple. What we call “RMA of Information”, by definition, has been a very limited phenomenon. In fact, it may be no more than a part of a much larger one; a “Military Revolution” in its entirety, whose central core would be the concept of “Network Centric Warfare”, which we already explained in our number 13. Concept born in the second half of the 90s in the United States, as a “new theory of war” in the words of Vice Admiral Arthur Cebrowski, one of its main promoters. Among other things, the original writing talks about the transition from “war centered on platforms” to “war centered on networks”, to explain to us how it is necessary to make the leap from an idea of military operations in which to rely on the chariot of faster, protected and longer-range combat, with the most agile and fastest fighter-bomber or with the most lethal warship was the essential thing, to another in which what is truly important is the relationship that we manage to establish between the observation and recognition systems , the platforms and weapon systems, their operators and command. This is so, on the presumption that the greater this interconnection, measured in volume of data transmitted, the easier it will be to obtain supremacy in the information which in turn gives rise to superiority in the decision and, as a consequence, dominance in the battlefield. In other words, the ultimate objective of "Network-Centric Warfare" is to accelerate the well-known OODA cycle (Observe → Orient → Decide → Act) in such a way that combat actions occur at an unprecedented pace, which would prevent any enemy reaction.
All of this, which sounds very abstract, means that the network must be capable of providing any commander, whether in the field or in any headquarters, with all the necessary data to make the most appropriate decision. each situation and, if possible, faster than the opponent. This includes not only information on the number of enemies, their position, their direction of advance or their weapons, but also any relevant data on one's own forces, from the deployment adopted to the type and number of ammunition available, the possible units that could provide support at a given time or the intelligence data collected. Needless to say, despite numerous advances, it remains more of an aspiration than a reality. Simply put, the battlefield is too complex and variable for this image, what we call "situational awareness" is not continually distorted by a multitude of elements, from communication problems to masking actions carried out by the enemy, own coordination failures, etc.
Be that as it may, none of this would be possible without deploying observation and reconnaissance means up to the challenge that provide the required data, which has led to unprecedented development of autonomous systems, initially used in observation tasks and, with the passage of time, assuming more and more functions (reconnaissance, attack, provision of shooting data...). A learning process that in its early stages has been relatively slow but that, since the 90s and especially since the last decade and the interventions in Afghanistan and Iraq, has accelerated to reach exponential growth rates in some cases. For example, during 2005 the US went from having 150 UGVs and drones of various types to more than 5.000, a figure that a decade later was 7.000 and 12.000 devices respectively, thanks both to the need imposed by presence in the aforementioned scenarios as well as advances in a specific field, that of Artificial Intelligence.
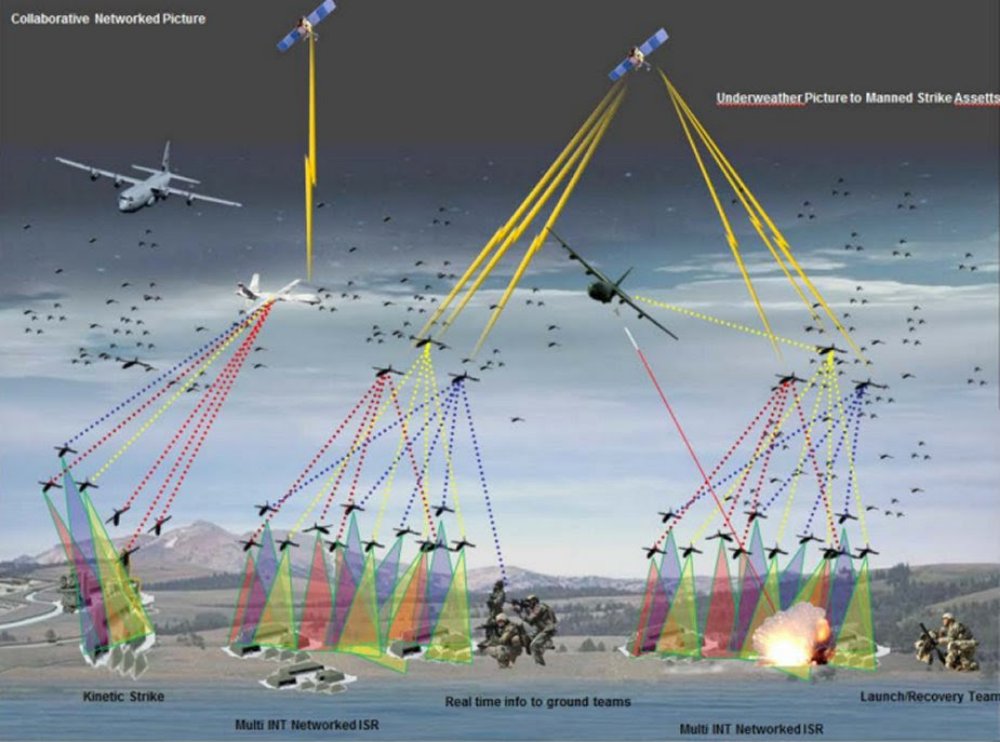
The last phase so far of this revolution that we are experiencing is carried out by what has been called "swarms" (from the English swarm). Within a swarm, a set of various elements coordinated with each other, allow, thanks to the use of Artificial Intelligence, to undertake a series of missions that, using individual platforms, would be impossible to carry out. For its operation to be possible, the transmission of data between the elements that make it up must be fluid and for them to be truly useful, the enormous amount of information obtained by the addition of elements must be filtered so that the operator is not saturated. . To do this, it is essential that many of the tasks are completely automated.
If all these premises are met, swarms make it possible to accelerate the aforementioned OODA cycle even further. For example - and on paper, since they are developing technologies - the same swarm could collect data about possible objectives, transmit them to other units on the ground or in the air or beat these same objectives since different elements within the They could also carry different payment burdens.
Of course, none of this is free of problems, whether technical, doctrinal or organic. As they are disruptive technologies, there is still a long way to go before the most appropriate doctrines for their use are developed, youth failures are polished or the organic ones are adapted to be able to incorporate them in the most appropriate way into the structure of any army. . In the same way, although the promises are enormous, they have to demonstrate that they are capable of doing the same as other systems currently in use or in development, both from the point of view of effectiveness and cost. After all, there are a good number of systems in service whose functions could overlap with those of swarms, in the case of some types of missiles, for example.
Despite the above, everything indicates that the use of swarms for an increasing number of missions is the next step within the evolution process that we have explained and that is why it is necessary to start working on it as soon as possible, in order not to lose the technological and industrial career. This is where the Madrid company Escribano Mechanical & Engineering (EME) comes in, which in recent weeks has begun to publicize its LISS (Long Range Intelligent Security System) program. This is the first Spanish drone swarm project and, in fact, the first of its kind in the European Union. We have been fortunate to be able to speak with both the engineers and the former military personnel who advise the company regarding this development and over the next few pages we will try to explain what we have learned about the possibilities of this program, as well as about the challenges you face.

The origins of the LISS program
In various media we have been able to read that the LISS program was launched just a few months ago, during which time the core of the solutions it offers have been developed. Now, this, while still being true, is a simplification and hides a part of the history of LISS that deserves to be told. It is also illustrative of the company's ability to take advantage of opportunities that others discard.
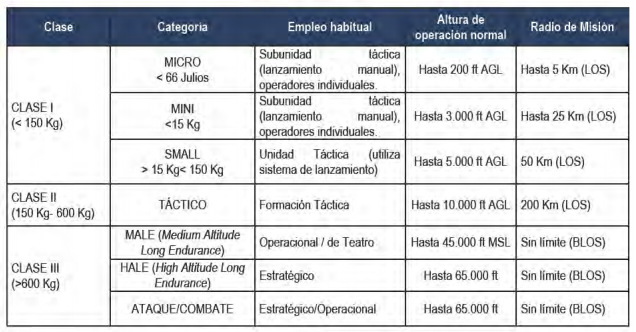
To understand how we got here, we have to first go back to June 2015, when the Ministry of Defense, specifically the Subdirectorate of Planning, Technology and Innovation (SDG PLATIN) of the DGAM, launched the RAPAZ Project. As is well known, the purpose of this initiative is the operational evaluation, with funding from the Ministry of Defense, of Remotely Manned Air Systems (RPAS) Class I, that is, with a takeoff weight of less than 150 Kg. As is usually done In these cases, the DGAM invited various Spanish companies with mature designs that allow them to provide Intelligence, Surveillance and Reconnaissance (ISR) capabilities, to participate. Now, the platforms, that is, the RPAS, are nothing more than part of a much more ambitious program, which contemplates the evaluation and subsequent development of various technologies, including those of swarming (swarm), related.
In the case of Escribano, the company from Alcalá de Henares had been working for some time - at least since 2016 - on the development of several of these technologies, both in relation to the design of future own drones and anti-drone systems. soft kill y hard kill. These own initiatives include swarm technology, which allowed Escribano to participate in joint projects with companies such as Airbus, for example, in the integration of the FITS mission system or Fully Integrated Tactical System). As is customary at Escribano, all projects were financed - unless specific development contracts were achieved - with its own resources and non-refundable funds. Always hoping to gain clients in the future, either in the Middle East, where they have a large presence, or in our country, something they have been achieving with various products, such as their Guardian or Sentinel weapons stations. Seeing the business opportunity, the company management decided to create its own department that would be very useful as a basis for what would come later.
More recently, a series of events would occur that would contribute to involving the company in the future LISS program. On the one hand, they won a contract from the General Subdirectorate of Weapons and Material Acquisitions of the DGAM valued at 100.000 euros and intended for the development of a national distributed and multi-platform swarm system for ISTAR (Intelligence, Reconnaissance, Surveillance and Acquisition) missions. of Objectives), known as SENDISTAR (Autonomous Distributed and multi-platform Swarm System for ISTAR missions). This program is part of Phase II of the RAPAZ program, which we have talked about. On the other hand, from the DGAM itself, although unofficially, the company was informed of the situation of some engineers of extraordinary value who, due to various vicissitudes, had seen the funds allocated to their projects cut, if not cancelled. In all cases, these were people who had worked at companies such as Airbus and Everis and who had an impressive background, especially related to swarm technologies.
Thus, the management of Escribano, obsessed with attracting talent (they employ more than 450 people with a very high percentage of engineers and They finance their own chair at the University of Alcalá whose students they feed on), did not hesitate to make an offer to these engineers to incorporate them into their ranks. In this way, even though the LISS program is relatively recent, barely a few months old, the team that develops it accumulates years of experience that add to what the company had acquired through its own means.

What is the LISS program?
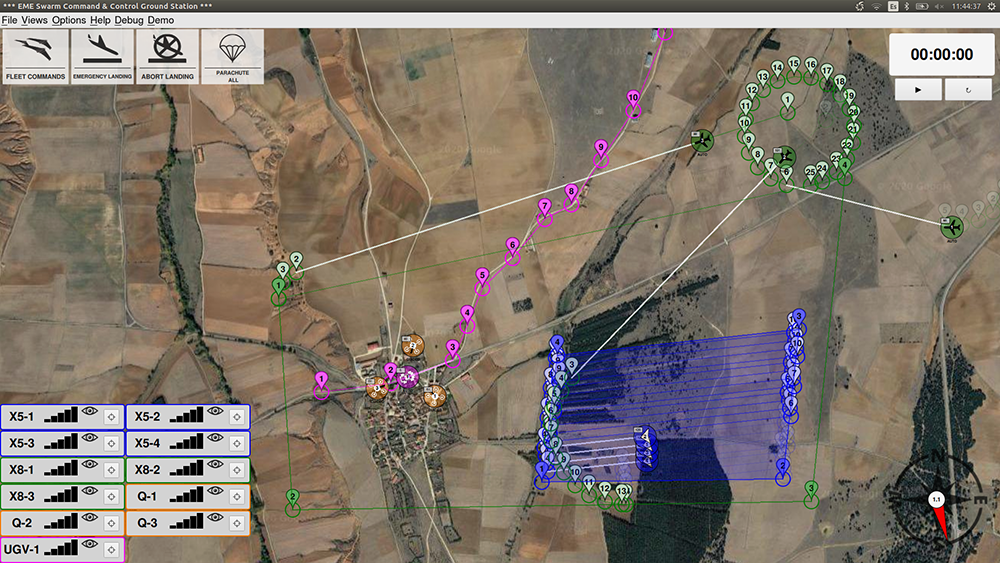
The LISS (Long Range Intelligent Security System) program, despite its cryptic name, seeks, in a nutshell, to bring a complete drone swarm solution to the market. This means that they not only intend to provide software capable of making decisions autonomously, but also to develop the platforms and associated systems, from the ground control stations to some of the possible payloads carried by the drones, well established. of weapons, optronic systems or any other.
The system Escribano is working on It is a Human-on-the-Loop type, that is, one capable of discriminating objectives, setting them and even attacking them by itself but which, at all times, is under human supervision; An operator can, at any time, intervene in the decisions made by the system, correcting possible errors, assigning flight exclusion zones or aborting a mission. In this way, the drones that make up the swarm have autonomy when moving, being able to reach the designated area by themselves, avoiding possible obstacles, choosing the optimal route, finding objectives by their own means, etc. What they cannot, however, is make critical decisions - such as using their weapons, for example - without the approval of an operator.
This last issue, that of the autonomy of each component of the swarm, is key and requires a clarification. Normally, even in specialized media, the term “swarm” is used interchangeably to catalog many things that are not. For example, to talk about attacks with groups of drones in which each device - be it four or forty - is managed by an operator who coordinates with others. It is also common to see different demonstrations on the Internet in which a group made up of dozens or even hundreds of drones perform complex choreographies, in many cases adorned with beautiful lights, as in the video that we share below and which earned the organizers a Guinness record. .
It is, without a doubt, an overwhelming spectacle that hides an important technological development behind it, but nothing to do, in terms of complexity or future applications, with the true swarms, those that operate based on a network architecture and intelligence and decision-making. of distributed decisions.
The fundamental difference, as we say, lies in the architecture and the use of artificial intelligence, with all that this implies. A “swarm” of the type that appears in the video is nothing more than a sum of drones in which each of the parts executes a series of previously programmed instructions. The human operator can change the choreography on the fly, but little else. Furthermore, normally one of the devices acts as the leader of the group and has more complex communications equipment or processing means than the rest, so if it is shot down or suffers any failure, the whole device falls apart. They are very useful systems for making beautiful demonstrations, but with a military or FCSE application that is quite questionable, or rather non-existent, despite their spectacular nature.
On the contrary, in the case of distributed swarms, each of the devices can perform the same functions as all the others (without prejudice to the fact that each of them, if necessary, can take on specific missions). Decision making is collaborative and non-hierarchical. That is, when deciding whether to carry out an action of any kind, the drones question each other and make the decision by majority, thanks to the fact that all the elements that make up the system have the same data and , therefore, with the same elements of judgment. The same when choosing which element of the set must undertake a specific mission, such as, for example, “sacrifice” by attacking an objective. Simplifying it greatly, we could say that each device takes into account factors such as its flight route and the obstacles it may encounter, its proximity to the target, the fact whether or not it maintains communication with the ground or whether it has been affected for whatever reasons. , the remaining autonomy, its payload - it makes no sense for it to attack an element that does not carry a war load but rather an optronic system -, etc. In this way, each member of the swarm, evaluating all this and other data, casts a vote and sends the information to the rest. From the sum of votes, a decision is generated that gives rise to one action or the opposite. Of course, none of the devices are critical, so if one or more of them is shot down or is affected, for example by enemy electronic warfare systems, the mission continues its course with the remaining units. In the case of devices that have been victims of jamming or any other attack - and as long as they can continue flying - they will choose to land safely, return to the point of origin (something they can do even without a GPS signal) or, in the case of recovering the signal, rejoin the mission.
Escribano's proposal, according to the engineers working on the LISS program, even goes further, since each element of the swarm is entrusted with the responsibility not only of navigating and calculating flight routes, but also of analyzing the data obtained by the systems that constitute the payment burden for each device: optical and infrared cameras, radars or whatever is considered necessary. They can thus locate targets such as battle tanks or howitzers by sending their discoveries to the control station.
Achieving this has meant conceiving a series of elements, layers and capabilities that so far we have not seen fully implemented in any other project launched by companies or EU member states and that, at a global level, we have barely seen in the US. USA or Israel[4]. In this way, the LISS design is divided into three basic elements:
- System architecture: The architecture of the swarm focused on command and control, that is, the element that allows the group to take off, evolve in the air, land autonomously and in a coordinated manner, etc.
- Payment charge: The different equipment that each element of the swarm can carry, whether observation systems, weapons, etc.
- Human-machine interface: The equipment (screens, joysticks, keypads) and software that make up the ground station and through which the LISS operator interacts with the swarm. In this case, unlike what happens with most RPAS, in the event that the ground station is destroyed or any problem occurs, the mission would continue its course and, at the end of it, the devices would return to a point prefixed.
For all of them to fulfill their function harmoniously, as we have suggested previously, certain capabilities are necessary:
- Deliberative layer: members of the swarm must be able to make decisions in a decentralized and non-hierarchical manner. This implies that none of the elements of the swarm is more important than another or acts as a node, but that all of them can undertake the same roles and have the same responsibility and capabilities in terms of AI or navigation as the rest. As we have explained, the elements decide by majority.
- Security Layer: In the event of system malfunctions or any type of unusual behavior occurring for whatever reasons, the system must be able to detect them and act accordingly, for example, aborting the mission or forcing the platform to crash land. or platforms that are causing problems. If necessary, even its self-destruction, if this possibility is implemented.
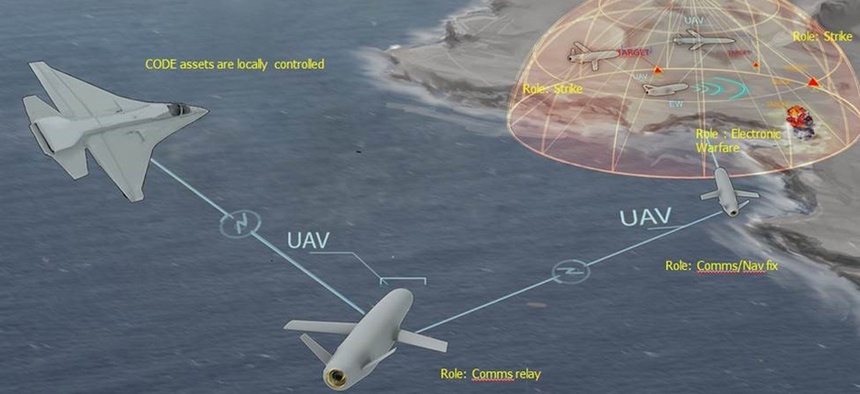
- Manned-Umnanned Teaming (MUM-T) Capability: Since its conception, the LISS program has been designed taking into account the need to interact with manned platforms, such as combat aircraft, warships or battle tanks. In this sense, they must be able to send data regarding their position at all times to avoid possible collisions, they must be able to share the information captured by the optical or infrared sensors they carry, be able to discriminate friends and enemies, and exchange data on the position of the vehicles. targets to proceed with their destruction from drones or from the systems with which they interact, whether airplanes, artillery, etc.
- Collision prediction system: Its mission, obviously, is to control at all times the position of the rest of the elements that make up the swarm, anticipating their trajectories and preventing them from coinciding. The system has the ability to adapt in real time to changes in direction of the rest of the elements, derived from new instructions or alterations in the environment. This capacity is closely linked to the previous one, since there is a very real possibility that the swarm will have to act in a fairly congested environment (planes, helicopters, other drones and even missiles can be in flight at the same time).
- Dynamic communications system: It is designed to adapt both to changes in the number of elements that the swarm may suffer, and to the availability of bandwidth. In this sense, the system works by sending each device a series of messages per second that contain information about the trajectory or “state of health” of the element. This implies the need to transfer a large amount of information in real time (to which must be added the data obtained, for example, by observation teams), which limits the number of elements that can be part of the swarm. Now, if it were necessary to incorporate more elements into the set, the number of messages per second could be reduced, allowing the operation to continue to be possible with the same bandwidth, even assuming some risk. Furthermore, as the company has explained to us, it is possible to incorporate more sophisticated communications equipment in the future, assuming a certain extra cost, but making it possible to operate a much larger number of elements.
- Mission module: This subsystem is in charge of planning the routes, Waypoints, areas to avoid, etc., of each element depending on each mission. Its function is essential, since it must be able to calculate the routes of multiple UAVs autonomously and so that they do not collide (although the collision prediction system can modify the route on the fly if it detects any risk once the devices are in flight).
- Intelligence layer: To reach a successful conclusion, the program needs to overcome an important obstacle: the overabundance of information. Unlike what happens, for example, with drones Raven or even with larger ones, such as Searcher or, further, with the Predator-B in service with the FAS, here we are talking about a network that will receive data from several dozen devices in real time. It is impossible for a single operator to handle such a flow of information without collapsing after a few seconds, which is why filtering capacity seems key. In this sense, one of the priority efforts of engineers is to free the operator from all those functions that are not vital or that can be assumed by AI, such as navigation. A single operator will be able to manage the swarm, since his or her job will consist of assigning the areas to observe, those to avoid, selecting the targets from among those that have been detected, deciding whether to attack them or not, or suspend the mission if necessary. Of course, devices like Predator-BOnce the route is predetermined, they fly completely autonomously and their operators are focused on intelligence collection or, where appropriate, attack tasks. In the case of LISS, the automation work and the effort to free operators from any accessory task is even greater thanks to this layer of intelligence that is also responsible, in other words, for separating the wheat from the chaff so that the operator can focus on what is essential. At the moment, and as far as we know, the company has managed to have a single operator attend to the flow of information provided by up to six drones, each with its own payload composed of different observation equipment, which is already an important achievement. They hope, however, that this number will continue to increase in the future until there are dozens of elements.
We therefore have that, as a whole, LISS is a design of a complexity that has nothing to do with the majority of RPAS offered by the market - and even less so by the Spanish one - and that, if everything announced is endorsed in the tests carried out carried out starting this summer, could be light years away in terms of possibilities.

LISS: growth possibilities
As we have explained, the LISS program seeks to offer a complete solution. So far, the tests that have been carried out, such as the one carried out at the CENAD in San Gregorio in 2018, have used a swarm made up of fifteen small UAVs, largely based on COTS (commercial-off-the-shelf) products. -the-shelf). This is a relatively cheap and simple way to carry out all the development and validation of the core of the system, that is, the components that we have described in the previous section. However, the plans are much more ambitious and the possibilities are multiple.
First, the system has been designed to allow horizontal scalability. If you now control fifteen devices, only the investment (and at a certain point the cost/performance ratio of the system) in better communications and processing systems prevents this amount from growing to dozens or even hundreds of elements.
Secondly, LISS also considers the need to scale the system vertically, connecting elements from different categories. Nothing prevents what are now about fifteen small drones, type small (Class I, >15 Kg < 150 Kg), in the future they will be higher categories, according to the classification used by our Ministry of Defense[5]. A swarm could therefore be created in which drones of classes I, II and even III were connected for the same mission, achieving important synergies. In fact, theoretically nothing prevents - beyond the investment in its development - a class II or III RPAS acting as a nurse for smaller devices, launching them once close to the target to be observed or beaten.
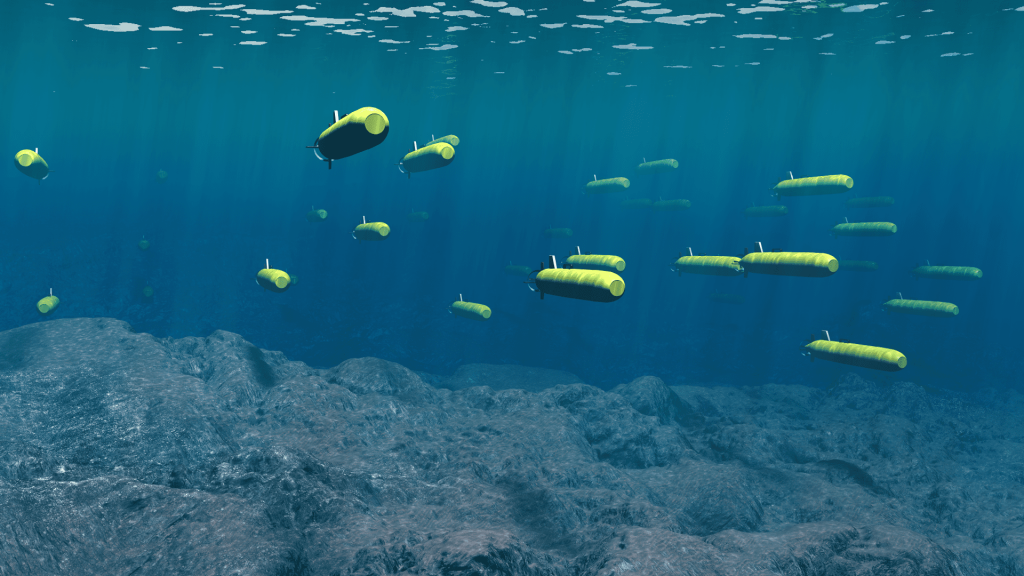
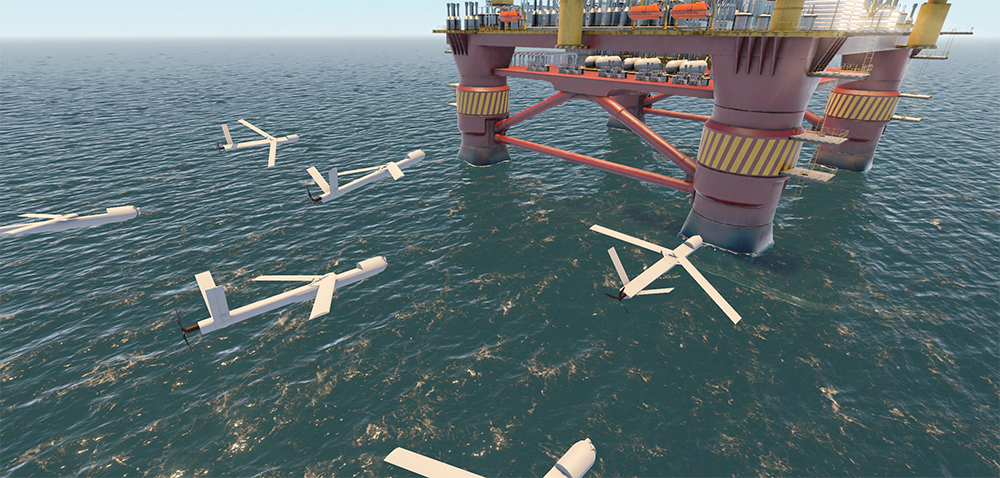
Third and finally, we must talk about the possibilities of transversal growth. Until now we have focused on the possibility of using LISS to form autonomous and decentralized RPAS swarms, but the system has been proposed to go further. Thanks to the experience in UGVs (Unmanned Ground Vehicle), gained in part from the Baltic Milrem, LISS could do the same with this type of devices, integrating them into a hypothetical swarm. In fact, it could combine these and RPAS for a mission, as well as integrate USVs (Surface Unmanned Vehicle), that is, autonomous surface ships. By extension, although we are focusing on UAVs, the core of the system could serve as a basis for forming swarms of only land or marine systems.
The latter, however, are possibilities that deserve qualification. In the case of UGVs, they face their own difficulties that UAVs do not have to face; Evolving on the ground, with the number of different types of obstacles that can be found, is much more complicated than following a flight route. Similarly, in the case of USVs, difficulties are also significant due to waves and changing marine conditions, although more and more projects are being developed (In Spain we have several examples such as Navantia's "Vendaval") and they are not, in either case, insurmountable problems. Curiously, the other environment in which navigation could most resemble aerial navigation -the submarine-, is banned for the moment not because of the difficulty of moving under the surface of the sea, but because of the complexity of underwater communications.
In summary, what the core of the LISS program offers, beyond a specific solution, is enormous versatility: the possibility of adapting to future needs, as long as potential clients invest the necessary funds to adapt the development of Escribano to each scenario. or need.
military applications
The LISS program was born with the aim of serving, both in the civil and military spheres, as a means of observation and recognition. Military applications regarding ISR and ISTAR[7], are multiple, with the advantage, unlike the RPAS currently in service, of distributing tasks among multiple cheaper platforms - and in some cases even fungible - and which can be complemented with different optical, infrared, etc. systems.
For example, in the Spanish case and currently, The Field Artillery Command has the GAIL (Information and Location Group) that centralizes the most sophisticated acquisition means, like RPAS Atlantic, Arthur counterbattery radars or HALO sound location means. Of these systems, the most modern are those mentioned Atlantic, RPAS manufactured by Everis and acquired within the Rapaz program that have come to replace the much more sophisticated and effective ones in the task of acquiring artillery targets Searcher, now dependent on the Intelligence Regiment No. 1. It is a type I system that weighs 50 kg and is capable of carrying a payload of five kilograms (observation equipment) 100 km away, remaining on station for up to five hours. Despite its virtues, the area it can cover is limited, since there is only one device in the air. Logically, if he is killed the mission is interrupted, since it takes time to prepare and launch another unit if it is available. Of course, it is limited to ISTAR functions, with no possibility of attack and to carry a single payload.
On the contrary, in the case of resorting to a swarm, various elements could complement the capabilities of the set by carrying complementary sensors or providing information from different angles or even, if necessary, launching an attack from the air, since they can act as loitering munitions. Furthermore, even in the event that one or more of the elements were victims of countermeasures or anti-aircraft systems, the group could continue to provide real-time images and precise shooting data to the artillery. It also assesses the damage in case it is necessary to continue searching the area.
On the other hand, these functions, which we assimilate with howitzer-based artillery, whether self-propelled or towed y rocket artillery, will be increasingly useful as support to the mortars embarked, and even to car units. After all, there are several projects that, in the most powerful armies, seek to provide battle tanks with the ability to hit beyond the line of sight, as a complement to the artillery and surpassing what in principle would be the unit's area of responsibility. The same can be said of mortar-carrying vehicles, which achieve increasingly greater ranges and, to be effective, require adequate observation means that increasingly range beyond what vehicles like the VERT allow.
Another basic function that LISS could address, especially if air launch platforms are developed, would have to do with the suppression of enemy air defenses (SEAD). As we know, to knock out an anti-aircraft system it is enough to hit its most sensitive parts, such as scanning radars or command posts. This does not require ammunition with a large warhead, but it is feasible to put these elements out of service with small explosions. The problem is often, especially when faced with a well-designed IADS, getting close enough. This is all the easier the more attack vectors and avenues of approach there are, something that a distributed swarm system facilitates, in addition to allowing the mission to continue assuming casualties, thanks to its resilience.
Nor should we forget that one of the characteristics of the future war will be the salvo war, topic that we have addressed in this publication on several occasions. Although we instinctively associate the concept of salvos with missiles and rockets, it does not have to be that way and drones will play a key role due to their cost/effectiveness ratio. We have seen what a few drones used in groups can do, for example, to an air base, as in the attack suffered on January 6, 2018 by the Russian Khmeimim air base, In Syria. On that occasion, with a few devices whose operators acted in coordination, but which were in no way comparable to what programs such as LISS offer, a significant blow was dealt to the Russian deployment in the country. Since then Russian anti-aircraft/anti-drone defenses have improved and have been able to repel several similar attacks. However, it is difficult to believe that they could do the same against a true swarm in which each of the elements attacked from different directions and heights and also in waves.
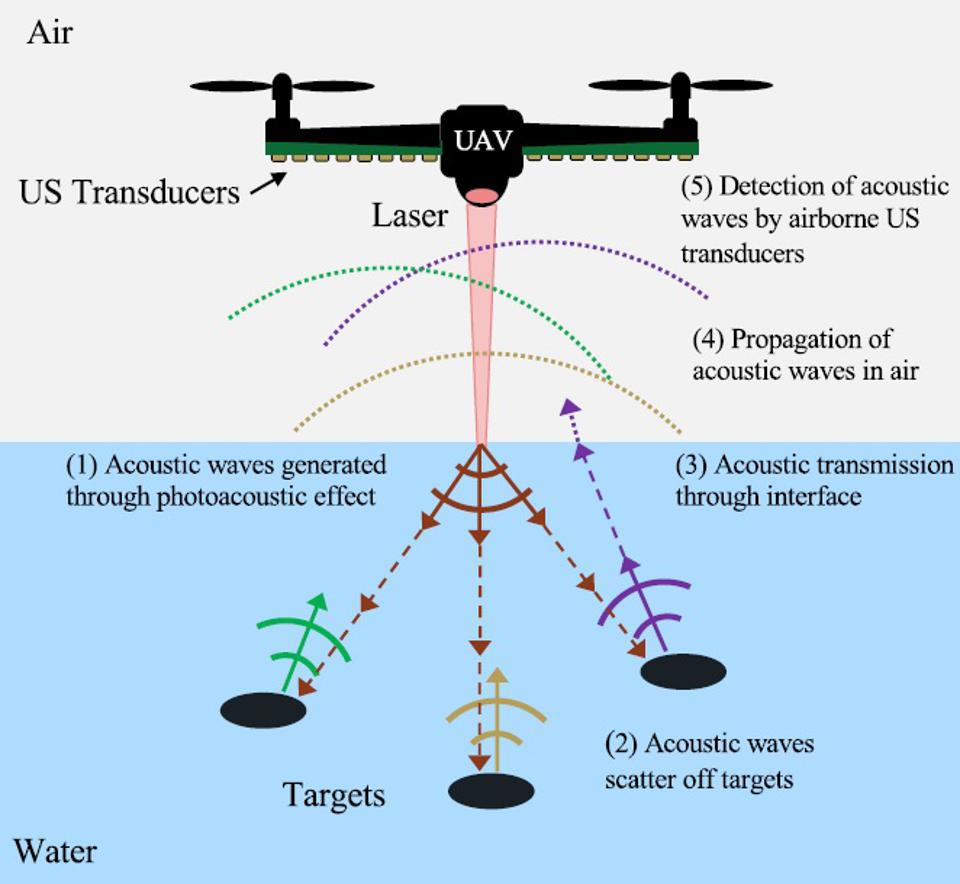
Finally, it is worth being aware that, at least for the future, distributed systems promise to be the perfect basis for developing virtually revolutionary capabilities in many other fields. A clear example is that of maritime patrol, with experiments underway like the one carried out by Stanford University, in which a radar located on a drone would allow submarines to be located from the air, opening a new world of possibilities as a complement or substitute for sonobuoys and helicopter-mountable sonars. The advantages of setting up the system are obvious. While manned helicopters must arrive at a position, set the sonar, listen, pick up and repeat the operation at a different location each time, a swarm equipped with aerial sonars could theoretically do the same from various locations.
Civil applications from the LISS program
In a publication like ours, it is logical that we focus on military applications. However, they are by no means the only ones and, in fact, we are more likely to see LISS enter service sooner with the FCSE than with the FAS. As we have explained, using a swarm with one or two dozen coordinated elements allows a large area to be covered in detail, minimizing detection times. This, which is useful in war, is also useful in peace, for example, when locating victims of possible natural disasters, outbreaks of forest fires, spills in the sea, etc. By not depending on a single device being in a position to locate whatever is being sought, but rather on several devices doing so at the same time, the deadlines - sometimes critical - are reduced.
Another obvious application is border control. Organizations such as the Civil Guard or the European FRONTEX could monitor in real time and with greater precision the areas of passage for immigrants both on land and at sea. The latter would also increase the possibilities of rescue, thus reducing the number of people who drown each year in the Mediterranean or in transit to the Canary Islands.
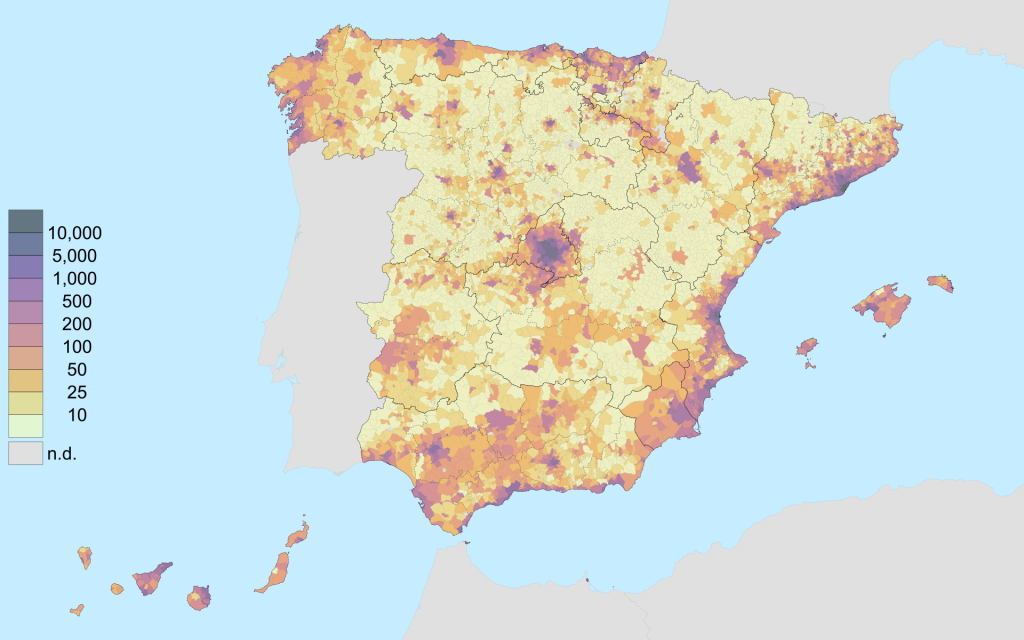
A final service that LISS could provide, although it may seem curious, has to do with what has been called “emptied Spain” and with the prevention and prosecution of crimes. In recent times, there are more and more regions in the interior of the peninsula that the Civil Guard has problems covering. Unfortunately, a recurring image is that of the Benemérita barracks with a sign on the door with the personal telephone number of the agents - who must take charge of several towns or very extensive municipal areas - and they cannot cope, nor They can meet “office” hours. Without a doubt any reader from Extremadura, the two Castiles or southern Aragon will understand it and may even have suffered from it. Thus, Escribano is convinced that LISS could allow a single agent to cover a very large area, thinking, for example, of those areas with very low population density. Vehicles or even specific people could be searched in case a crime has been committed, but unpopulated areas could also be patrolled without having to move a 4×4 and knowing that, as it is a swarm, several points are covered at a time and not just one. .
Industrial benefits
An important aspect of the LISS program has to do with the value chain, which remains practically intact in Spain. The software, which is the vault key, is Escribano's own development. The design of the RPAS that make up the system that the company offers - without prejudice to the client being able to adapt others in the future - will also be Spanish, like many of the pieces. Logically, many others, from the propeller to the engine, will be acquired from third parties, since it would be uneconomical to manufacture them when there are specialized companies capable of producing them at more competitive prices and they are parts without a high technological component and that, if necessary, could be replicated here. The use of commercial components, from communications to navigation systems, reduces the final price and has the advantage of allowing them to be exchanged for similar ones if a supplier fails.
In relation to the above, although it is evidently a program of a specific company - in this case Escribano -, if an increase in production is needed due to a conflict or any other unforeseen scenario, this could be undertaken with a low investment. In fact, production could even be distributed among numerous companies, since the construction of the platforms does not entail great technical difficulty. The important thing is, no matter how you look at it, the software that gives life to the swarm and that, fortunately, does not have to be “manufactured.” Therefore, the lion's share of technological and industrial sovereignty remains Spanish, with all that this implies.
Prospects
At the moment, and beyond the Spanish Ministry of Defense, it seems that there have been several foreign organizations that have been interested in the LISS program. The vast majority originate from the Middle East, where the Madrid company enjoys great fame and has achieved large contracts for some of its star products, such as the Guardian towers. Let us also remember that Escribano, in addition to this region, maintains offices open in Peru, Australia or Algeria and, without a doubt, they are moving to publicize their project with a view to achieving the sales abroad that Spain denies them.
Leaving aside the obvious markets, there are other clients who, as we have mentioned, could see the LISS program as a solution to many of their needs. Among these, several FCSE organizations such as the Civil Guard or the National Police stand out. In the same way, Organizations such as SASEMAR, SEMAR or the SVA could benefit from its use. By extension, and at the European level, FRONTEX seems to be a potential client and, in fact, the company is doing everything possible to make itself known to said institution.
Of course, the Ministry of Defense should be, in the medium term, one of the main clients of LISS, although for this moment to arrive, prior work must be done that has not so much to do with budgets, as with the fit of this system in our FAS, a topic we address below.

An open future
As we explained at the beginning, the development of autonomous and distributed swarms, capable of taking advantage of all the advantages of network organization, is the logical consequence of a process that started decades ago. Despite the fact that it is increasingly common to talk about swarms and there are many news reports that refer to them, it is still a technology that is still in its infancy and we are still far from seeing all its possibilities. We will see these when the doctrines of use are mature and many of the solutions that are being presented and now seem promising, are discarded in the best testing ground that exists: war. Let's not forget that from the moment a potentially disruptive technology appears, until it is fully exploited, many things can happen. We only have to consider the case of gunpowder, used by the Chinese in the 13th century for things as curious as setting animals on fire in the hope of burning enemy defenses by sending them into a stampede. All before finding uses much more appropriate to its potential, such as cannons or harquebuses. Uses that, in turn, required organic and doctrinal changes, such as the creation of the Tercios, to begin to take full advantage of what was suspected. Currently, with respect to some technologies such as Artificial Intelligence, we are in a similar situation. We know that its potential is enormous, but we still cannot know what the most appropriate uses will be and all that remains is to experiment until we find them.
Although it is easy to get carried away by euphoria, conflicts like the one in Donbass or the Nagorno-Karabakh, in which intensive use of drones has been made in ISR/ISTAR and Battle Damage Assessment missions, but also ground attack, could be an exception. The absence of air forces or the low economic and industrial capacity of the contenders, who depended on the help of third parties to support their FAS, could be masking reality. In a conflict between peers, the use of fighter jets or the possibility of having a well-nourished IADS network, could nullify a good part of the advantages that we have seen in the use of drones, loitering munitions, etc. Even in these conflicts, especially in the Donbass, much longer than the one fought between Azerbaijan and Armenia, we have seen adaptations aimed at reducing the effectiveness of drones, from the use of electronic warfare systems to deny or erode the GPS signal and communication with the control station to, even, resorting to something as simple as camouflage or the construction of bunkers and trenches.
In another order of things, there are problems that we could call “fit” and that we have discussed before. As with any disruptive technology, the structures and doctrine of the armed forces that must implement it are not designed for it, so they must adapt to incorporate the new systems. Countries like the US already have specific doctrines for using drone swarms and NATO, through the Allied Command Transformation, is also working on it. In Spain, the task surely corresponds to the Directorate of Research, Doctrine, Organic and Materials (DIDOM), the body in charge of developing the new doctrines and which is part of the Training and Doctrine Command (MADOC) of the Army.
Regarding the organic, the incorporation of a system like LISS would surely force the creation of new units that would have to be incorporated into the new organizational charts that would be created, both functional and operational. According to Division General (r) Francisco Rosaleny and Navy Captain (r) Francisco Romero de Paula, both advisors to Escribano, from the operational point of view and in the case of the Army, the unit that operated the swarm should be at brigade level in Infantry and regiment in the case of Cavalry. It could also be integrated into the Field Artillery Command. In the case of the Air Force, it should be integrated at the Squadron level and in the Navy, at the level of Task Force/Task Group. However, this would depend exactly on the specific capabilities and payloads of the swarms, since depending on whether they are configured for ISR, ISTAR, combat missions or a mixture of all of them, the fit should be different, as less in the opinion of our collaborator, the cavalry colonel (r) Fernández Mateos. Let us not forget that when the Army considered the arrival of the first RPAS beyond the Raven and the PASI (Searcher Mk-IIJ), there was an important debate within the institution about whether they should be integrated into Artillery or Intelligence and That is, given that they do not have weapons and focus on ISTAR missions, the decision is simpler. In the case of LISS, however, it will be more complex, precisely because of its multiple possibilities.
The underlying problem is that, as it is a product developed by a private company, no matter how outstanding it may be, it does not respond to a specific need, such as the one that can be included in a General Staff Requirements document. This, despite the fact that the DGAM has had and has a lot to do with the birth of the program. In any case, the process that must be followed for its hypothetical adoption will be the opposite of the usual one. Normally, it is the FAS that ask companies to develop a solution to their problems by launching a Request for Information or directly a contest. In this case, LISS must demonstrate that it can perform a series of tasks better than the systems currently in use and although simulations suggest that this will be the case in many cases, it will have to face tough operational evaluations before deciding to acquire it, once it is ready. fully developed.
The most feasible solution is to acquire a system for evaluation, which would help develop these hypothetical doctrines and assess possible organic changes. In fact, it is also possible that the company, which has experience in this, may provide the necessary equipment for this function. This way of acting has already given interesting results in the past. We only have to remember the case of the Peruvian Navy, to which Escribano gave equipment that later, after demonstrating its virtues in practice, have become a success.

Conclusions
If the LISS program fulfills everything it promises on paper, Escribano will have managed to fully place Spain in the exclusive club of countries capable of developing technologies. swarming actually distributed by their own means. A club in which only a handful of countries enter and none of them members of the European Union, since the United Kingdom, the only one that has launched comparable projects, no longer belongs to it.
The market opportunities, especially abroad, are enormous. Now, the path will not be easy, since there are many obstacles to overcome and they will require a large investment, something difficult to undertake, as until now, practically alone. In this sense, the role of Spanish institutions as initial clients could be key. Also that of some potential clients, especially from the Middle East.
The possibilities of the program are, at least theoretically, immense. To materialize, it still needs numerous tests - the next ones are expected to be carried out starting in the summer -, the development of a wide variety of payment burdens - some of which are quite advanced - and a correct doctrinal and organic fit within of the FAS or any organization that adopts this system. The company is confident in overcoming all these and other obstacles that may arise and, although we can never know what the future will bring, its track record to date is an endorsement.

Be the first to comment