
El programa LISS es la última gran novedad de la empresa española Escribano Mechanical & Engineering. Se trata de un sistema de enjambre de drones autónomo y distribuido diseñado para afrontar misiones muy diversas, desde ISR/ISTAR a ataque a tierra, control de fronteras, vertidos o incendios forestales, evaluación de daños o localización de víctimas de naufragios o desastres naturales, entre otros. Es un proyecto pionero, que cuenta con el respaldo de la DGAM y que, si realmente cumple con lo anunciado, será un éxito comercial y marcará un antes y un después para la industria española de defensa. Además, colocará a España dentro del exclusivo grupo de países capaces de desarrollar este tipo de tecnologías. Un selecto club del que todavía no forma parte ningún otro estado miembro de la Unión Europea.
En más de una ocasión nos hemos referido en estas páginas a la «RMA de la Información», nacida en gran parte como consecuencia de la «Segunda Estrategia de Compensación» estadounidense, lanzada tras la salida de Vietnam. Efectivamente, tras el varapalo sufrido en dicha guerra, se llegó a la conclusión de que era necesario iniciar un nuevo ciclo inversor que permitiese alumbrar nuevas tecnologías susceptibles de contrarrestar la superioridad soviética en medios convencionales en teatros como el europeo. Además, la disponibilidad de nuevas armas y plataformas permitiría a los militares norteamericanos superar el trauma sufrido, que había afectado a la moral del colectivo y minado la confianza en la institución. De esta forma, aprovechando las posibilidades que abrían los últimos descubrimientos científicos, en especial aquellos relacionados con la cibernética, el complejo industrial-militar norteamericano pudo desarrollar nuevos y sorprendentes equipos a cuya puesta de largo asistimos en la Guerra del Golfo.
Ahora bien, la cuestión no es tan sencilla. Lo que llamamos «RMA de la Información», por definición, ha sido un fenómeno muy limitado. De hecho, es posible que no sea más que una parte de otro mucho mayor; una «Revolución Militar» en toda regla, cuyo núcleo central sería el concepto de «Network Centric Warfare», que ya explicáramos en nuestro número 13. Concepto nacido en la segunda mitad de los años 90 en los Estados Unidos, como una “nueva teoría de la guerra” en palabras del Vicealmirante Arthur Cebrowski, uno de sus principales impulsores. Entre otras cosas, el escrito original habla del paso de la «guerra centrada en plataformas» a la «guerra centrada en redes», para explicarnos cómo es necesario dar el salto desde una idea de las operaciones militares en la que contar con el carro de combate más rápido, protegido y con mayor alcance, con el cazabombardero más ágil y veloz o con el navío de guerra más letal era lo primordial, a otra en la que lo verdaderamente importante es la relación que logramos establecer entre los sistemas de observación y reconocimiento, las plataformas y sistemas armas, sus operadores y el mando. Es así, en la presunción de que cuanto mayor sea esta interconexión, medida en volumen de datos transmitidos, más sencillo será obtener la supremacía en la información que da lugar a su vez a una superioridad en la decisión y, como consecuencia, al dominio en el campo de batalla. Dicho de otro modo, el objetivo último de la «Guerra Centrada en Redes» pasa por acelerar el conocido ciclo OODA (Observar → Orientar → Decidir → Actuar) de tal forma que las acciones de combate se sucedan a un ritmo sin precedentes, lo que impediría cualquier reacción enemiga.
Todo esto, que suena muy abstracto, lo que viene a decir es que la red debe ser capaz de proveer a cualquier mando, bien sea sobre el terreno o bien en cualquier cuartel general, de todos los datos precisos para tomar la decisión más adecuada a cada situación y a ser posible, con mayor rapidez que el contrario. Esto incluye no solo información sobre el número de enemigos, su posición, su dirección de avance o su armamento, sino también cualquier dato relevante sobre las fuerzas propias, desde el despliegue adoptado al tipo y número de municiones disponibles, las posibles unidades que podrían prestar apoyo en un momento dado o los datos de inteligencia recolectados. No hace falta decir que, a pesar de los numerosos avances, sigue siendo más una aspiración que una realidad. Simple y llanamente el campo de batalla es demasiado complejo y variable como para que esta imagen, lo que denominamos «conciencia situacional» no se vea continuamente distorsionada por multitud de elementos, desde problemas de comunicación a las acciones de enmascaramiento llevadas a cabo por el enemigo, los fallos de coordinación propios, etc.
Sea como fuere, nada de esto sería posible sin desplegar medios de observación y reconocimiento a la altura del desafío que provean de los datos requeridos, lo que ha llevado a un desarrollo sin precedentes de los sistemas autónomos, empleados al principio en tareas de observación y, con el paso del tiempo, asumiendo cada vez más funciones (reconocimiento, ataque, provisión de datos de tiro…). Un proceso de aprendizaje que en sus primeras etapas ha sido relativamente lento pero que, desde los años 90 y muy especialmente desde la pasada década y las intervenciones en Afganistán e Irak, se ha visto acelerado hasta alcanzar tasas de crecimiento exponenciales en algunos casos. Por ejemplo, durante el año 2005 los EE. UU. pasaron de contar con 150 UGV y drones de diversos tipos a más de 5.000, una cifra que una década después era de 7.000 y 12.000 aparatos respectivamente, gracias tanto a la necesidad impuesta por la presencia en los citados escenarios como a los avances en un campo concreto, el de la Inteligencia Artificial.
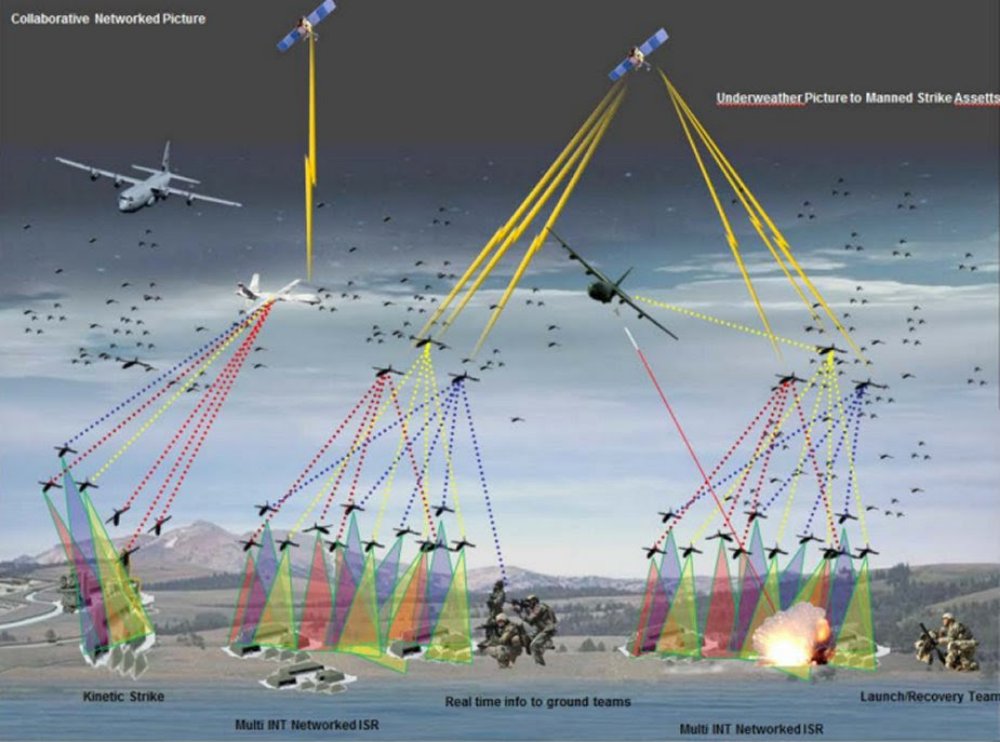
La última fase hasta el momento de esta revolución que estamos viviendo, la protagonizan lo que se ha dado en llamar «enjambres» (del inglés swarm). Dentro de un enjambre, un conjunto de diversos elementos coordinados entre sí, permiten, gracias al uso de la Inteligencia Artificial, acometer una serie de misiones que, utilizando plataformas individuales, serían imposibles de llevar a cabo. Para que su funcionamiento sea posible, la transmisión de datos entre los elementos que lo forman debe ser fluido y para que sean realmente útiles, la enorme cantidad de información obtenida por la suma de elementos debe ser filtrada de forma que el operador no se vea saturado. Para ello, es imprescindible que muchas de las tareas estén completamente automatizadas.
Si todas estas premisas se cumplen, los enjambres hacen posible acelerar más si cabe el citado ciclo OODA. Por ejemplo -y sobre el papel, ya que son tecnologías en desarrollo-, un mismo enjambre podría recolectar datos acerca de posibles objetivos, transmitirlos a otras unidades sobre el terreno o en el aire o bien batir estos mismos objetivos ya que distintos elementos dentro del mismo podrían llevar cargas de pago diferentes.
Por supuesto, nada de esto está libre de problemas, tanto técnicos como doctrinales u orgánicos. Al ser tecnologías disruptivas, todavía queda un largo camino que recorrer antes de que se desarrollen las doctrinas más adecuadas para su empleo, se pulan los fallos de juventud o se adapten las orgánicas para poder incorporarlos de la forma más adecuada a la estructura de cualquier ejército. De la misma forma, aunque las promesas son enormes, tienen que demostrar que son capaces de hacer lo mismo que otros sistemas actualmente en uso o en desarrollo, tanto desde el punto de vista de la eficacia, como del coste. Al fin y al cabo, hay un buen número de sistemas en servicio cuyas funciones podrían solaparse con las de los enjambres, caso de algunos tipos de misiles, por ejemplo.
A pesar de lo anterior, todo apunta a que el uso de enjambres para un número creciente de misiones es el siguiente paso dentro del proceso de evolución que hemos explicado y por eso es necesario comenzar a trabajar en ello cuanto antes, de cara a no perder la carrera tecnológica e industrial. Es ahí en donde entra la empresa madrileña Escribano Mechanical & Engineering (EME), que en las últimas semanas ha comenzado a dar a conocer su programa LISS (Long Range Intelligent Security System). Se trata del primer proyecto español de enjambre de drones y, de hecho, el primero de su tipo en la Unión Europea. Hemos tenido la suerte de poder hablar tanto con los ingenieros como con los exmilitares que asesoran a la empresa de cara a este desarrollo y a lo largo de las próximas páginas vamos a tratar de explicar lo que hemos aprendido sobre las posibilidades de este programa, así como sobre los retos a los que se enfrenta.

Los orígenes del programa LISS
En diversos medios hemos podido leer que el programa LISS fue lanzado hace apenas unos meses, tiempo en el que se han desarrollado el núcleo de soluciones que el mismo ofrece. Ahora bien, esto, sin dejar de ser cierto, sí es una simplificación y esconde una parte de la historia de LISS que merece ser contada. Es, además, ilustrativa de la capacidad de la empresa para aprovechar oportunidades que otros descartan.
Para entender cómo se hemos llegado hasta aquí, tenemos que remontarnos en primer lugar, a junio de 2015, cuando el Ministerio de Defensa, en concreto la Subdirección de Planificación, Tecnología e Innovación (SDG PLATIN) de la DGAM, lanzó el Proyecto RAPAZ. Como es bien sabido, esta iniciativa tiene por objeto la evaluación operativa, con financiación por parte del Ministerio de Defensa, de Sistemas Aéreos Tripulados Remotamente (RPAS) Clase I, es decir, con un peso al despegue inferior a 150 Kg. Como suele hacerse en estos casos, la DGAM invitó a diversas empresas españolas con diseños ya maduros y que permitan aportar capacidades de Inteligencia, Vigilancia y Reconocimiento (ISR), a participar. Ahora bien, las plataformas, esto es, los RPAS, no son más que una parte de un programa mucho más ambicioso, que contempla la evaluación y posterior desarrollo de diversas tecnologías, entre ellas las de swarming (enjambre), relacionadas.
En el caso de Escribano, la empresa de Alcalá de Henares llevaba tiempo trabajando -al menos desde 2016-, en el desarrollo de varias de estas tecnologías, tanto en lo relativo al diseño de futuros drones propios, como de sistemas antidrone softkill y hardkill. Entre estas iniciativas propias cabe citar la tecnología de enjambres, lo que permitió Escribano participar en proyectos conjuntos con empresas como Airbus, por ejemplo, en la integración del sistema de misión FITS o Fully Integrated Tactic System). Como es costumbre en Escribano, todos los proyectos se financiaban -salvo que se lograsen contratos de desarrollo puntuales- con recursos propios y a fondo perdido. Siempre con la esperanza de lograr clientes en el futuro, bien en Oriente Medio, en donde tienen una gran implantación, bien en nuestro país, algo que han venido logrando con diversos productos, como sus estaciones de armas Guardian o Sentinel. Atisbada la oportunidad de negocio, la dirección de la empresa decidió crear un departamento propio que sería muy útil como base a lo que vendría después.
Más recientemente, se producirían una serie de hechos que coadyuvarían a la hora de implicar a la empresa en el futuro programa LISS. Por una parte, se hicieron con un contrato de la Subdirección General de Adquisiciones de Armamento y Material de la DGAM valorado en 100.000 euros y destinado al desarrollo de un sistema nacional de enjambre distribuido y multiplataforma para misiones ISTAR (Inteligencia, Reconocimiento, Vigilancia y Adquisición de Objetivos), conocido como SENDISTAR (Sistema autónomo de Enjambre Distribuido y multiplataforma para misiones ISTAR). Este programa forma parte de la Fase II del programa RAPAZ, del que hemos hablado. Por otra, desde la propia DGAM, aunque de forma extraoficial, se informó a la empresa de la situación de algunos ingenieros de extraordinario valor que, por diversos avatares, habían visto recortados los fondos asignados a sus proyectos, cuando no cancelados. En todos los casos, se trataba de personas que habían trabajado en empresas como Airbus y Everis y que contaban con un impresionante bagaje, en especial relativo a las tecnologías de enjambres.
Así las cosas, la dirección de Escribano, obsesionada con la captación de talento (dan trabajo a más de 450 personas con un altísimo porcentaje de ingenieros y financian una cátedra propia en la Universidad de Alcalá de cuyos estudiantes se nutren), no dudó en hacer una oferta a dichos ingenieros para incorporarlos a sus filas. De esta forma, a pesar de que el programa LISS es relativamente reciente, con apenas unos meses de vida, el equipo que lo desarrolla acumula años de experiencia que se suman a la que la empresa había adquirido a por sus propios medios.

¿En qué consiste el programa LISS?
El programa LISS (Long Range Intelligent Security System), a pesar de su críptico nombre, lo que busca, en pocas palabras, es llevar al mercado una solución completa de enjambre de drones. Esto quiere decir que no sólo pretenden alumbrar un software capaz de tomar decisiones de forma autónoma, sino también desarrollar las plataformas y los sistemas asociados, desde las estaciones de control en tierra hasta algunas de las posibles cargas de pago que transporten los drones, bien consten de armamento, sistemas optrónicos o de cualquiera otras.
El sistema en el que Escribano está trabajando es del tipo Human-on-the-Loop, es decir, aquel capaz de discriminar objetivos, fijarlos e incluso atacarlos por sí mismo pero que, en todo momento, se encuentra bajo supervisión humana; un operador puede, en cualquier momento, intervenir sobre las decisiones que toma el sistema, corrigiendo posibles errores, asignando zonas de exclusión de vuelo o abortando una misión. De esta forma, los drones que forman el enjambre poseen autonomía a la hora de moverse, pudiendo llegar por sí mismos a la zona designada evitando posibles obstáculos, eligiendo la ruta óptima, encontrando objetivos por sus propios medios, etc. Lo que no pueden, no obstante, es tomar decisiones críticas -como utilizar su armamento, por ejemplo-, sin la aprobación de un operador.
Este último asunto, el de la autonomía de cada componente del enjambre, es clave y obliga a introducir una matización. Normalmente, incluso en medios especializados, se emplea indistintamente el término “enjambre” para catalogar muchas cosas que no lo son. Por ejemplo, para hablar de ataques con grupos de drones en los que cada aparato -sean cuatro o cuarenta- es manejado por un operador que se coordina con otros. También es habitual ver en Internet diferentes demostraciones en las que un grupo formado por decenas o incluso cientos de drones ejecutan complejas coreografías, en muchos casos adornados con hermosas luces, como en el vídeo que compartimos a continuación y que valió a los organizadores un récord Guinness.
Es, sin duda, un espectáculo abrumador y que esconde detrás un importante desarrollo tecnológico, pero nada que ver, en cuanto a complejidad o aplicaciones futuras, con los verdaderos enjambres, aquellos que operan en base a una arquitectura en red y una inteligencia y toma de decisiones distribuidas.
La diferencia fundamental, como decimos, radica en la arquitectura y en el recurso a la inteligencia artificial, con todo lo que ello implica. Un “enjambre” del tipo que aparece en el vídeo no es más que una suma de drones en los que cada una de las partes ejecuta una serie de instrucciones previamente programadas. El operador humano puede cambiar la coreografía sobre la marcha, pero poco más. Además, normalmente uno de los aparatos actúa como líder del grupo y cuenta con equipos de comunicaciones o medios de procesamiento más complejos que los del resto, con lo que, si es abatido o sufre cualquier fallo, el conjunto se desmorona. Son sistemas muy útiles para hacer hermosas demostraciones, pero con una aplicación militar o para las FCSE bastante cuestionable, o más bien nula, pese a su espectacularidad.
Por el contrario, en el caso de los enjambres distribuidos, cada uno de los aparatos puede realizar las mismas funciones que todos los demás (sin perjuicio de que cada uno de ellos, de ser necesario, pueda asumir misiones específicas). La toma de decisiones es colaborativa y no jerárquica. Es decir, que a la hora de decidir si se lleva a cabo una acción del tipo que sea, los drones se interrogan entre ellos y toman la decisión por mayoría, gracias a que todos los elementos que conforman el sistema cuentan con los mismos datos y, por lo tanto, con los mismos elementos de juicio. Lo mismo a la hora de elegir qué elemento del conjunto debe afrontar una misión determinada, como, por ejemplo, “sacrificarse” atacando un objetivo. Simplificándolo mucho, podríamos decir que cada aparato toma en cuenta factores como su ruta de vuelo y los obstáculos que pudiera encontrar, la cercanía al objetivo, el hecho de si mantiene o no comunicación con tierra o esta se ha visto afectada por las razones que sean, la autonomía restante, su carga de pago -no tiene sentido que ataque un elemento que no lleva carga de guerra sino un sistema optrónico-, etc. De esta forma, cada miembro del enjambre, valorando todos estos y otros datos, emite un voto y envía la información al resto. De la suma de votos se genera una decisión que da lugar a una actuación o la contraria. Por supuesto, ninguno de los aparatos es crítico, de forma que, si uno o varios de ellos es abatido o se ve afectado por ejemplo por los sistemas de guerra electrónica enemigos, la misión continúa su curso con las unidades restantes. En el caso de los aparatos que hayan sido víctimas de jamming o cualquier otro ataque -y siempre que puedan seguir volando- optarán por aterrizar de forma segura, volver al punto de origen (algo que pueden hacer incluso sin señal GPS) o bien, en el caso de recuperar la señal, volver a unirse a la misión.
La propuesta de Escribano, según los ingenieros que trabajan en el programa LISS, incluso va más allá, pues se confía a cada elemento del enjambre la responsabilidad no solo de navegar y calcular las rutas de vuelo, sino también el análisis de los datos obtenidos por los sistemas que constituyan la carga de pago de cada aparato: cámaras ópticas e infrarrojas, radares o lo que se considere necesario. Pueden así localizar objetivos como carros de combate u obuses enviando sus descubrimientos a la estación de control.
Lograr esto ha supuesto concebir una serie de elementos, capas y capacidades que hasta el momento no hemos visto implementadas en su totalidad en ningún otro proyecto lanzado por empresas o estados miembros de la UE y que, a nivel global, apenas hemos visto en los EE. UU. o Israel[4]. De esta forma, el diseño de LISS se divide en tres elementos básicos:
- Arquitectura del sistema: La arquitectura del enjambre enfocada a mando y control, es decir, el elemento que hace que el conjunto pueda despegar, evolucionar en el aire, aterrizar de forma autónoma y coordinada, etc.
- Carga de pago: Los distintos equipos que cada elemento del enjambre puede transportar, sean sistemas de observación, armas, etc.
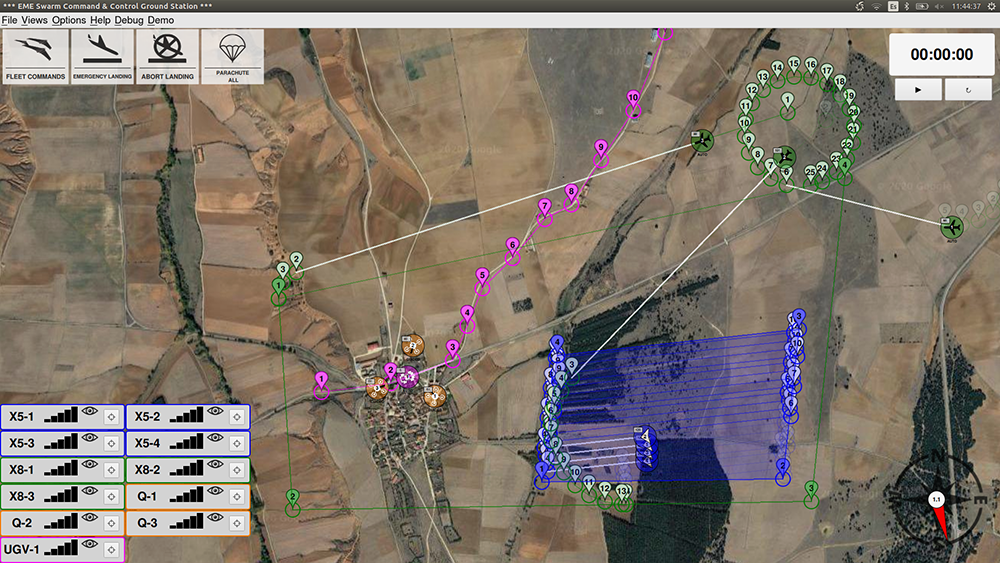
- Interfaz hombre-máquina: El equipo (pantallas, joysticks, botoneras) y el software que forman la estación en tierra y mediante el cual el operador de LISS interactúa con el enjambre. En este caso, a diferencia de lo que ocurre con la mayoría de RPAS, en caso de que la estación en tierra sea destruida o se diera cualquier problema, la misión continuaría su curso y, al final de esta, los aparatos retornarían a un punto prefijado.
Para que todos ellos cumplan su función de forma armoniosa, como hemos sugerido anteriormente, son necesarias ciertas capacidades:
- Capa deliberativa: los miembros del enjambre deben poder tomar decisiones de forma descentralizada y no jerárquica. Esto implica que ninguno de los elementos del enjambre es más importante que otro o actúa de nodo, sino que todos ellos pueden acometer los mismos roles y tienen la misma responsabilidad y capacidades en cuanto a IA o navegación que el resto. Como hemos explicado, los elementos deciden por mayoría.
- Capa de Seguridad: En caso de mal funcionamiento del sistema o de que se produzca cualquier tipo de comportamiento fuera de lo normal por las razones que sean, el sistema debe poder detectarlos y actuar en consecuencia, por ejemplo, abortando la misión o forzando el aterrizaje forzoso de la plataforma o plataformas que estén causando problemas. Llegado el caso, incluso su autodestrucción, si se implementa esta posibilidad.
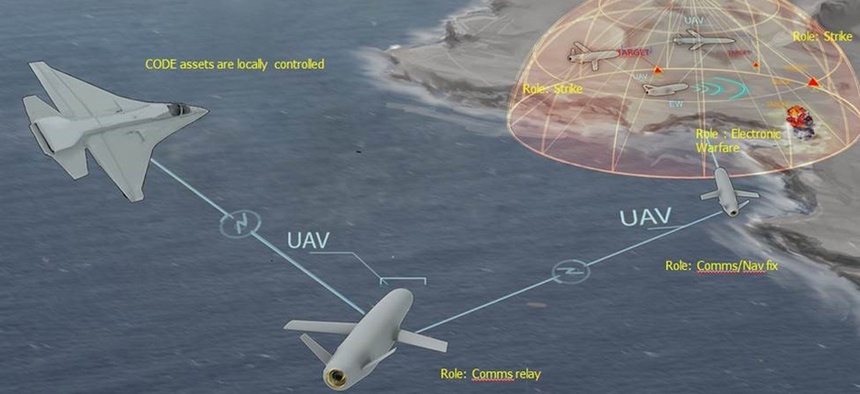
- Capacidad Manned-Umnanned Teaming (MUM-T): Desde su concepción, el programa LISS se ha pensado teniendo en cuenta la necesidad de interactuar con plataformas tripuladas, como pueden ser aviones de combate, buques de guerra o carros de combate. En este sentido, deben poder enviar en todo momento datos referentes a su posición para evitar posibles colisiones, han de poder compartir la información captada por los sensores ópticos o infrarrojos que porten, poder discriminar amigos y enemigos, e intercambiar datos de la posición de los objetivos para proceder a su destrucción desde los drones o desde los sistemas con los que interactúan, sean aviones, artillería, etcétera.
- Sistema de previsión de colisiones: Su misión, obviamente, es la de controlar en todo momento la posición del resto de elementos que forman el enjambre, adelantándose a sus trayectorias y evitando que puedan coincidir. El sistema cuenta con la capacidad de adaptarse en tiempo real a los cambios de rumbo del resto de elementos, derivados de nuevas instrucciones o de alteraciones en el entorno. Esta capacidad está íntimamente ligada con la anterior, pues existe la posibilidad, bastante real, de que el enjambre deba actuar en un ambiente bastante congestionado (aviones, helicópteros, otros drones e incluso misiles pueden estar en vuelo en un mismo momento).
- Sistema de comunicaciones dinámico: Está pensado para adaptarse tanto a los cambios en cuanto a número de elementos que pueda sufrir el enjambre, como a la disponibilidad de ancho de banda. En este sentido, el sistema funciona enviando a cada aparato una serie de mensajes por segundo en los que se contiene información sobre la trayectoria o el “estado de salud” del elemento. Esto implica la necesidad de transferir una gran cantidad de información en tiempo real (a la que deben sumarse los datos obtenidos por ejemplo por los equipos de observación), lo que limita el número de elementos que pueden formar parte del enjambre. Ahora bien, en el caso de que fuese necesario incorporar más elementos al conjunto, el número de mensajes por segundo podría reducirse, permitiendo que, con el mismo ancho de banda, el funcionamiento siguiese siendo posible, aun asumiendo algún riesgo. Además, según nos han explicado en la empresa, cabe la posibilidad de incorporar equipos de comunicaciones más sofisticados en el futuro, asumiendo cierto sobrecoste, pero haciendo posible operar un número de elementos mucho mayor.
- Módulo de misión: Este subsistema es el encargado de planificar las rutas, waypoints, áreas a evitar, etc, de cada elemento en función de cada misión. Su función es primordial, ya que debe ser capaz de calcular las rutas de múltiples UAVs de forma autónoma y de manera que no colisionen (aunque el sistema de previsión de colisiones puede modificar la ruta sobre la marcha en caso de detectar algún riesgo una vez los aparatos están en vuelo).
- Capa de inteligencia: Para llegar a buen puerto, el programa necesita superar un escollo importante: la sobreabundancia de información. A diferencia de lo que ocurre por ejemplo con los drones tipo Raven o incluso con los de mayor tamaño, como los Searcher o, más allá, con los Predator-B en servicio con las FAS, aquí hablamos de una red que recibirá en tiempo real datos de varias decenas de aparatos. Es imposible que un único operador pueda atender semejante flujo de información sin colapsar a los pocos segundos, por lo que la capacidad de filtrado se antoja clave. En este sentido, uno de los esfuerzos prioritarios de los ingenieros pasa por liberar al operador de todas aquellas funciones que no sean vitales o que pueda asumir la IA, como la navegación. Un único operador podrá manejar el enjambre, ya que su labor consistirá en asignar las áreas a observar, aquellas a evitar, en seleccionar los objetivos de entre aquellos que se hayan detectado, decidir si atacarlos o no, o suspender la misión de ser necesario. Por supuesto, aparatos como los Predator-B, una vez prefijada la ruta, vuelan de forma totalmente autónoma y sus operadores están centrados en las tareas de recolección de inteligencia o, en su caso, de ataque. En el caso del LISS, la labor de automatización y el esfuerzo por liberar a los operadores de cualquier tarea accesoria es todavía mayor gracias a esta capa de inteligencia que se encarga también, dicho en plata, de separar el grano de la paja de forma que el operador pueda centrarse en lo esencial. Por el momento, y hasta donde sabemos, la empresa ha logrado que un único operador atienda el flujo de información proporcionado por hasta seis drones cada uno con su propia carga de pago compuesta de diferentes equipos de observación, lo que ya es un logro importante. Esperan, no obstante, que este número continúe aumentando en el futuro hasta sumar decenas de elementos.
Tenemos pues que, en conjunto, LISS es un diseño de una complejidad que nada tiene que ver con la mayoría de RPAS que ofrece el mercado -y aún menos el español- y que, si todo lo anunciado se ve refrendado en las pruebas que se lleven a cabo a partir del verano, podría estar a años luz en cuanto a posibilidades.

LISS: posibilidades de crecimiento
Como hemos explicado, el programa LISS busca ofrecer una solución completa. Hasta el momento, las pruebas que se han realizado, como la llevada a cabo en el CENAD de San Gregorio en 2018, han empleado un enjambre formado por una quincena de UAVs de pequeño tamaño, en buena parte basados en productos COTS (comercial-off-the-shelf). Esta es una forma relativamente barata y sencilla de poder realizar todo el desarrollo y validación del núcleo del sistema, esto es, los componentes que hemos descrito en el apartado anterior. No obstante, los planes son mucho más ambiciosos y las posibilidades, múltiples.
En primer lugar, el sistema ha sido diseñado para permitir la escalabilidad horizontal. Si ahora controla una quincena de aparatos, sólo la inversión (y llegados a un punto la relación coste/rendimiento del sistema) en mejores sistemas de comunicaciones y procesamiento impiden que esta cantidad crezca a cifras de decenas o incluso centenares de elementos.
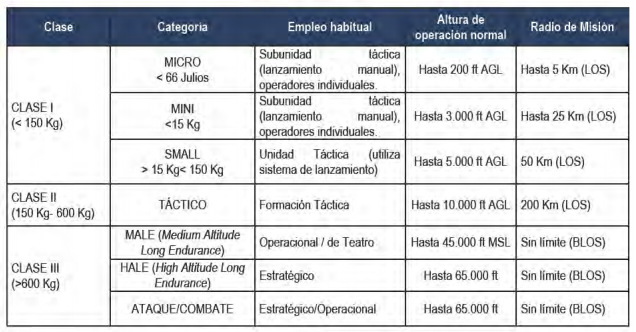
En segundo lugar, LISS también contempla la necesidad de escalar el sistema en vertical, conectando elementos de distintas categorías. Nada impide que lo que ahora son una quincena de drones de pequeño tamaño, tipo small (Clase I, >15 Kg < 150 Kg), en el futuro lo sean de categorías superiores, según la clasificación empleada por nuestro Ministerio de Defensa[5]. Podría pues crearse un enjambre en el que estuviesen conectados para una misma misión drones de las clases I, II e incluso III, logrando importantes sinergias. De hecho, teóricamente nada impide -más allá de la inversión en su desarrollo, que un RPAS clase II o III actúa de nodriza de aparatos más pequeños, lanzándolos una vez cerca del objetivo a observar o batir.
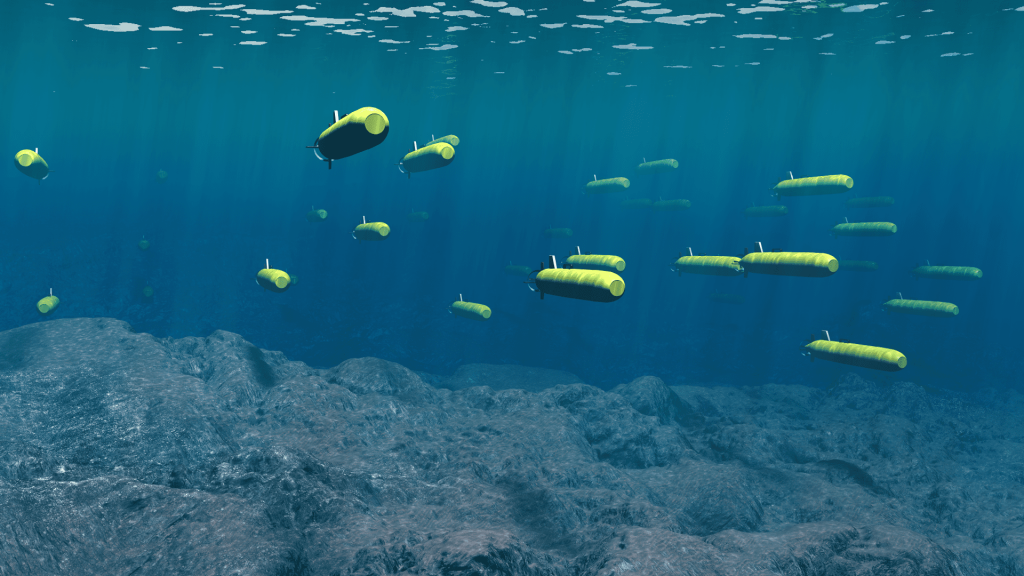
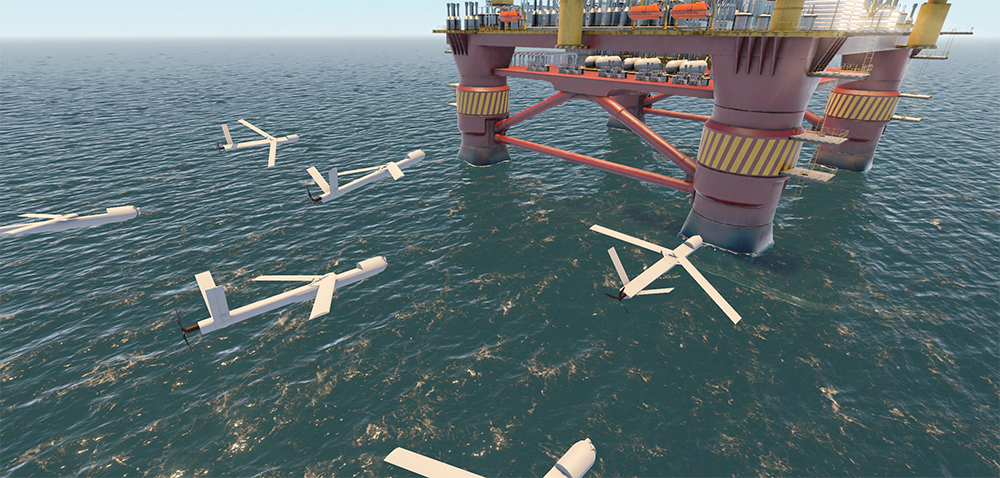
En tercer y último lugar, hemos de hablar de las posibilidades de crecimiento transversal. Hasta ahora nos hemos centrado en la posibilidad de utilizar el LISS para formar enjambres autónomos y descentralizados de RPAS, pero el sistema se ha planteado para ir más allá. Gracias a la experiencia en UGVs (Unmanned Ground Vehicle), ganada en parte de la mano de la báltica Milrem, LISS podría hacer lo mismo con este tipo de ingenios, integrándolos en un hipotético enjambre. De hecho, podría combinar estos y los RPAS de cara a una misión, así como también integrar USVs (Surface Unmanned Vehicle), esto es, buques de superficie autónomos. Por extensión, aunque nos estamos centrando en UAVs, el núcleo del sistema podría servir de base para formar enjambres únicamente de sistemas terrestres o marinos.
Estas últimas, no obstante, son posibilidades que merecen una matización. En el caso de los UGVs, se enfrentan a dificultades propias que no deben afrontar los UAV; evolucionar en tierra, con la cantidad de obstáculos de distintos tipos que pueden encontrarse, es mucho más complicado que seguir una ruta de vuelo. Del mismo modo, en el caso de los USV, las dificultades también son importantes debido al oleaje y las cambiantes condiciones marinas, aunque son cada vez más los proyectos en desarrollo (en España tenemos varios ejemplos como el «Vendaval» de Navantia) y no son, en ninguno de los dos casos, problemas insalvables. Curiosamente, el otro ambiente en el que la navegación más podría parecerse a la aérea -el submarino-, está vetado por el momento no por la dificultad de moverse bajo la superficie del mar, sino por lo complejo de las comunicaciones submarinas.
En resumen, lo que el núcleo del programa LISS ofrece, más allá de una solución puntual, es una enorme versatilidad: la posibilidad de adaptarse a futuras necesidades, siempre que los posibles clientes inviertan los fondos necesarios para adaptar el desarrollo de Escribano a cada escenario o necesidad.
Aplicaciones militares
El programa LISS nace con vocación de servir, tanto en el ámbito civil como en el militar, como medio de observación y reconocimiento. Las aplicaciones militares en cuanto a ISR e ISTAR[7], son múltiples, con la ventaja, a diferencia de los RPAS actualmente en servicio, de distribuir las tareas entre múltiples plataformas más baratas -y en algunos casos incluso fungibles- y que pueden complementarse con distintos sistemas ópticos, infrarrojos, etc.
Por ejemplo, en el caso español y en la actualidad, el Mando de Artillería de Campaña dispone del GAIL (Grupo de Información y Localización) que centraliza los medios de adquisición más sofisticados, como los RPAS Atlantic, los radares de contrabatería Arthur o medios de localización por sonido HALO. De estos sistemas, los más modernos son los citados Atlantic, RPAS fabricados por Everis y adquiridos dentro del programa Rapaz que han venido a relevar en la tarea de adquisición de objetivos de artillería a los mucho más sofisticados y eficaces Searcher, ahora dependientes del Regimiento de inteligencia Nº1. Se trata de un sistema de tipo I que tiene un peso de 50 kg y es capaz de llevar una carga de pago de cinco kilogramos (equipos de observación) a 100 km de distancia, permaneciendo en estación hasta cinco horas. A pesar de sus virtudes, el área que puede cubrir es limitada, pues hay un único aparato en el aire. Lógicamente, si es abatido la misión se interrumpe, ya que se tarda un tiempo en preparar y lanzar otra unidad en el caso de que esté disponible. Por supuesto, está limitado a funciones ISTAR, sin posibilidad de ataque y a transportar una única carga de pago.
Por el contrario, en el caso de recurrir a un enjambre, diversos elementos podrían complementar las capacidades del conjunto transportando sensores complementarios o bien aportando información desde diversos ángulos o incluso, llegado el caso, lanzando un ataque desde el aire, ya que pueden actuar como municiones merodeadoras. Además, incluso en el caso de que uno o varios de los elementos fuesen víctimas de contramedidas o sistemas antiaéreos, el conjunto podría seguir aportando imágenes en tiempo real y datos precisos de tiro a la artillería. También hace la evaluación de daños por si fuese necesario seguir batiendo la zona.
Por otra parte, estas funciones, que asimilamos con la artillería basada en obuses, bien sean autopropulsados o remolcados y artillería cohete, será cada vez más útil como apoyo a los morteros embarcados, e incluso a las unidades de carros. Al fin y al cabo, son varios los proyectos que, en los ejércitos más poderosos, buscan dotar a los carros de combate de la capacidad de golpear más allá de la línea de visión, como complemento de la artillería y sobrepasando la que en principio sería la zona de responsabilidad de la unidad. Lo mismo puede decirse de los vehículos portamorteros, que logran alcances cada vez mayores y que, para ser efectivos, necesitan de medios de observación adecuados que cada vez más van más allá de lo que permiten vehículos como el VERT.
Otra función básica que podría abordar LISS, especialmente si se desarrollan plataformas de lanzamiento aéreo, tendría que ver con la supresión de las defensas aéreas enemigas (SEAD). Como sabemos, para noquear un sistema antiaéreo basta con golpear sus partes más sensibles, como los radares de exploración o los puestos de mando. Para ello no se necesita de municiones con una gran cabeza de guerra, sino que es factible dejar fuera de servicio estos elementos con pequeñas explosiones. El problema suele ser, especialmente cuando nos enfrentamos a una IADS bien diseñada, acercarse lo suficiente. Esto es tanto más sencillo cuantos más sean los vectores de ataque y las avenidas de aproximación, algo que un sistema de enjambre distribuido facilita, además de permitir continuar la misión asumiendo bajas, gracias a su resiliencia.
Tampoco debemos olvidar que una de las características de la guerra futura, será la guerra de salvas, tema que hemos abordado en esta publicación en varias ocasiones. Aunque instintivamente asociamos el concepto de salvas con misiles y cohetes, no tiene por qué ser así y los drones jugarán un papel clave por su relación coste/eficacia. Hemos visto lo que unos pocos drones utilizados en grupo pueden hacer por ejemplo a una base aérea, como en el ataque sufrido el 6 de enero de 2018 por la base aérea rusa de Khmeimim, en Siria. En aquella ocasión, con unos pocos aparatos cuyos operadores actuaban coordinados, pero que en absoluto eran comparable a lo que ofrecen programas como LISS, se asestó un importante golpe al despliegue ruso en el país. Desde entonces las defensas antiaéreas/antidrone rusas han mejorado y han sido capaces de repeler varios ataques parecidos. Sin embargo, cuesta creer que pudiesen hacer lo propio contra un verdadero enjambre en el que cada uno de los elementos atacase desde distintas direcciones y alturas y además por oleadas.
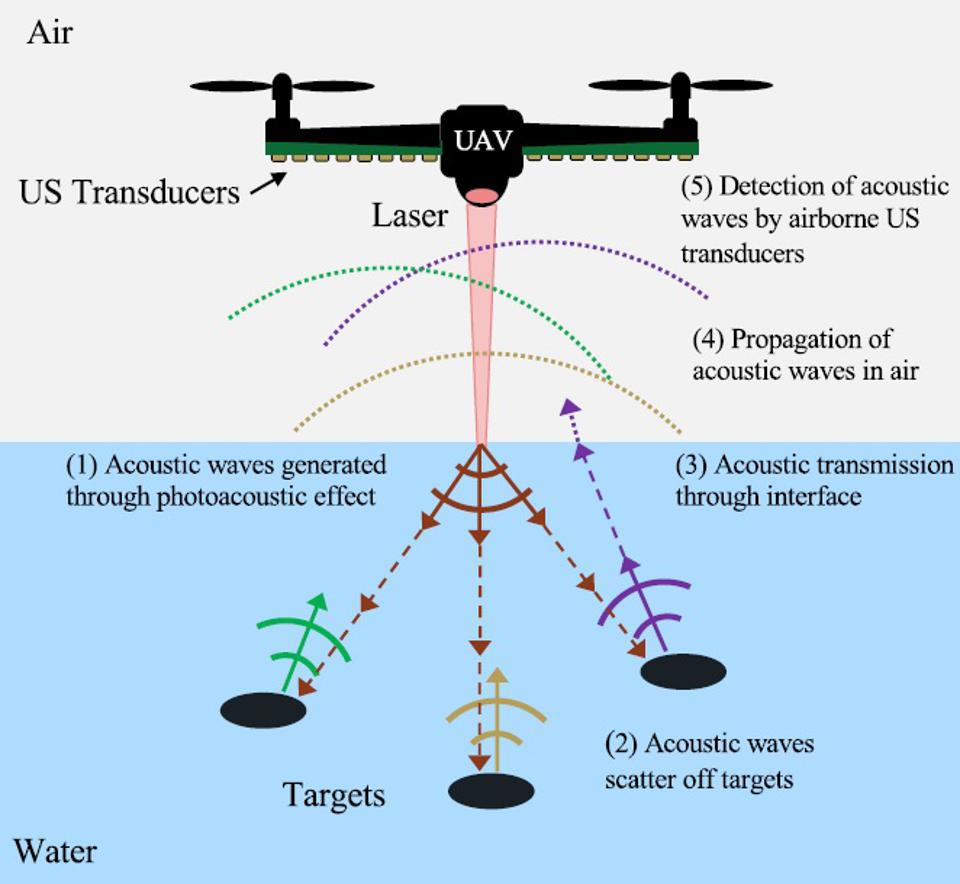
Por último, conviene ser conscientes de que, al menos de cara al futuro, los sistemas distribuidos prometen ser la base perfecta para desarrollar capacidades virtualmente revolucionaras en muchos otros campos. Un ejemplo claro es el de la patrulla marítima, con experimentos en marcha como el llevado a cabo por la Universidad de Stanford, en el que un radar situado en un drone permitiría localizar submarinos desde el aire, abriendo un nuevo mundo de posibilidades como complemento o sustituto de las sonoboyas y los sonares calables de los helicópteros. Las ventajas, de cuajar el sistema, son obvias. Mientras que los helicópteros tripulados deben llegar a una posición, calar el sonar, escuchar, recoger y repetir la operación en una ubicación distinta cada vez, un enjambre dotado de sónares aéreos podría teóricamente hacer lo mismo desde diversas ubicaciones.
Aplicaciones civiles del programa LISS
En una publicación como la nuestra, resulta lógico que nos centremos en las aplicaciones militares. No obstante, no son ni mucho menos las únicas y, de hecho, es más probable que veamos entrar en servicio a LISS antes con las FCSE que con las FAS. Como hemos explicado, utilizar un enjambre con una o dos decenas de elementos coordinados permite cubrir al detalle un área extensa, minimizando los tiempos de detección. Esto, que es útil en la guerra, también lo es en la paz, por ejemplo, a la hora de localizar víctimas de posibles desastres naturales, conatos de incendios forestales, vertidos en el mar, etc. Al no depender de que un único aparato esté en posición de localizar lo que sea que se busque, sino que son varios los que lo hacen a la vez, los plazos -en ocasiones críticos- se reducen.
Otra aplicación evidente pasa por el control de fronteras. Organismos como la Guardia Civil o la europea FRONTEX podrían monitorizar en tiempo real y con mayor precisión las zonas de paso de inmigrantes tanto en tierra como en el mar. Esto último, además, permitiría incrementar las posibilidades de rescate, reduciendo así el número de personas que cada año mueren ahogadas en el Mediterráneo o en su tránsito hacia las Canarias.
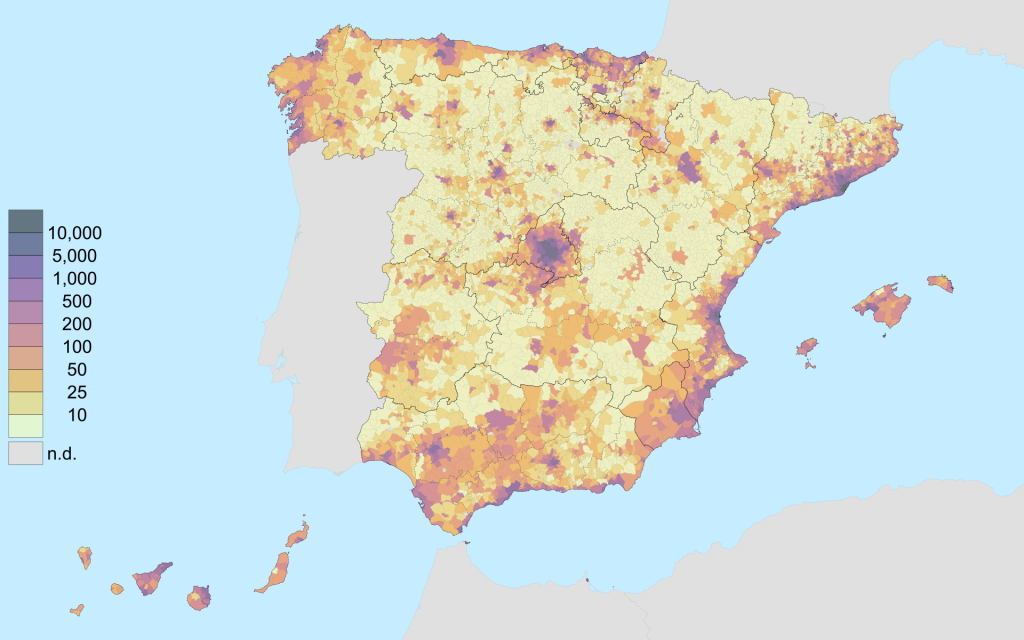
Un último servicio que LISS podría prestar, aunque parezca curioso, tiene que ver con lo que se ha dado en llamar la “España vaciada” y con la prevención y persecución de delitos. En los últimos tiempos, son cada vez más las regiones del interior de la península que la Guardia Civil tiene problemas para cubrir. Por desgracia, es una imagen recurrente la del cuartelillo de la Benemérita con un cartel en la puerta en el que figura el teléfono personal de los agentes -que deben hacerse cargo de varias poblaciones o de términos municipales muy extensos- y no dan abasto, ni pueden cumplir con un horario “de oficina”. Sin duda cualquier lector de Extremadura, las dos Castillas o el sur de Aragón lo entenderá e incluso puede que lo haya padecido. Así las cosas, en Escribano se muestran convencidos de que LISS podría permitir que un solo agente cubriese un área muy extensa, pensando por ejemplo en esas zonas con muy baja densidad poblacional. Podrían buscarse vehículos o incluso personas concretas en caso de haberse cometido un delito, pero también podrían patrullarse zonas despobladas sin necesidad de mover un 4×4 y sabiendo que, al tratarse de un enjambre, se cubren varios puntos a un tiempo y no sólo uno.
Beneficios industriales
Un aspecto importante del programa LISS tiene que ver con la cadena de valor, que se mantiene prácticamente íntegra en España. El software, que es la clave de bóveda, es un desarrollo propio de Escribano. El diseño de los RPAS que formen el sistema que la empresa oferte -sin perjuicio de que el cliente pueda adaptar otros en el futuro-, también será español, como buena parte de las piezas. Lógicamente otras muchas, desde la hélice al motor, serán adquiridas a terceros, pues sería antieconómico fabricarlos cuando hay empresas especializadas capaces de producirlas a precios más competitivos y son piezas sin un alto componente tecnológico y que en caso de necesidad podrían replicarse aquí. El recurso a componentes comerciales, desde los sistemas de comunicaciones a los de navegación, reduce el precio final y tiene la ventaja de permitir intercambiarlos por otros similares si un proveedor falla.
En relación con lo anterior, aunque evidentemente es un programa de una empresa concreta -en este caso Escribano-, en caso de necesitarse un aumento de la producción debido a un conflicto o cualquier otro escenario imprevisto, este podría acometerse con una escasa inversión. De hecho, incluso podría distribuirse la producción entre numerosas empresas, ya que la construcción de las plataformas no entraña gran dificultad técnica. Lo importante es, se mire como se mire, el software que da vida al enjambre y ese, por fortuna, no ha de “fabricarse”. Por lo tanto, la parte del león de la soberanía tecnológica e industrial sigue siendo española, con todo lo que ello implica.
Posibles clientes
Por el momento, y más allá del Ministerio de Defensa de España, parece que han sido varios los organismos extranjeros que se han interesado por el programa LISS. La gran mayoría, originarios de Oriente Medio, en donde la empresa madrileña goza de gran fama y ha logrado grandes contratos para alguno de sus productos estrella, como las torres Guardian. Recordemos también que Escribano, además de en esta región, mantiene oficinas abiertas en Perú, Australia o Argelia y, sin duda, se están moviendo para dar a conocer su proyecto con vistas a lograr fuera las ventas que España le niega.
Dejando a un lado los mercados obvios, hay otros clientes que como hemos comentado podrían ver en el programa LISS una solución a muchas de sus necesidades. Entre estos destacan varios organismos de las FCSE como la Guardia Civil o la Policía Nacional. Del mismo modo, organismos como SASEMAR, SEMAR o el SVA podrían beneficiarse de su empleo. Por extensión, y a nivel europeo, FRONTEX parece ser un cliente potencial y, de hecho, la empresa está haciendo lo posible para darse a conocer ante dicha institución.
Por supuesto, el Ministerio de Defensa debería ser, a medio plazo, uno de los principales clientes de LISS, aunque para que este momento llegue, debe hacerse un trabajo previo que no tiene tanto que ver con los presupuestos, como con el encaje de este sistema en nuestras FAS, tema que abordamos a continuación.

Un futuro abierto
Como hemos explicado al principio, el desarrollo de enjambres autónomos y distribuidos, capaces de aprovechar todas las ventajas de la organización en red, es la consecuencia lógica de un proceso que arranca décadas atrás. Pese a ser cada vez más común hablar de enjambres y ser multitud las noticias que se refieren a estos, no deja de ser una tecnología todavía en pañales y estamos aún lejos de atisbar todas sus posibilidades. Estas las iremos viendo cuando las doctrinas de uso estén maduras y muchas de las soluciones que se van presentando y ahora parecen prometedoras, queden descartadas en el mejor campo de pruebas que existe: la guerra. No olvidemos que desde que aparece una tecnología potencialmente disruptiva, hasta que se le saca todo el partido, puede ocurrir muchas cosas. No hay más que atender al caso de la pólvora, utilizada por los chinos en el S. XIII para cosas tan curiosas como prender animales con la esperanza de quemar las defensas enemigas al lanzarlos en estampida. Todo antes de encontrar usos mucho más adecuados a su potencial, como los cañones o los arcabuces. Usos que, a su vez, necesitaron de cambios orgánicos y doctrinales, como la creación de los Tercios, para comenzar a sacarle todo el partido que se sospechaba tenía. En la actualidad, respecto a algunas tecnologías como la Inteligencia Artificial, estamos en una situación parecida. Sabemos que su potencial es enorme, pero todavía no podemos saber cuáles serán los usos más adecuados y no queda sino experimentar hasta encontrarlos.
Aunque es fácil dejarse llevar por la euforia, conflictos como el del Donbáss o el del Nagorno-Karabaj, en los que se ha hecho un uso intensivo de los drones en misiones ISR/ISTAR y de evaluación de daños (Battle Damage Assessment), pero también de ataque a tierra, podrían ser una excepción. La ausencia de fuerzas aéreas o la escasa capacidad económica e industrial de los contendientes, que dependían de la ayuda de terceros para sostener a sus FAS, podrían estar enmascarando la realidad. En un conflicto entre pares, el uso de aviones de combate o la posibilidad de contar con una red IADS bien nutrida, podría anular buena parte de las ventajas que hemos visto en el empleo de drones, municiones merodeadoras, etc. Incluso en estos conflictos, especialmente en el Donbáss, mucho más largo que el que han librado Azerbaiyán y Armenia, hemos visto adaptaciones dirigidas a reducir la efectividad de los drones, desde el uso de sistemas de guerra electrónica para denegar o erosionar la señal GPS y la comunicación con la estación de control a, incluso, el recurso a algo tan sencillo como el camuflaje o la construcción de búnkeres y trincheras.
En otro orden de cosas, hay problemas que podríamos denominar “de encaje” y que hemos avanzado antes. Como sucede con cualquier tecnología disruptiva, las estructuras y la doctrina de las fuerzas armadas que deben implementarla no están diseñadas para ello, por lo que han de adaptarse para incorporar los nuevos sistemas. Países como los EE. UU. sí cuentan ya con doctrinas específicas de uso para enjambres de drones y la OTAN, a través del Mando Aliado de Transformación, también está trabajando en ello. En España, seguramente la tarea corresponda a la Dirección de Investigación, Doctrina, Orgánica y Materiales (DIDOM), órgano encargado de desarrollar las nuevas doctrinas y que forma parte del Mando de Adiestramiento y Doctrina (MADOC) del Ejército de Tierra.
Respecto a la orgánica, la incorporación de un sistema como LISS obligaría seguramente a la creación de nuevas unidades que habría que incorporar a su vez dentro de los nuevos organigramas que se crearían, tanto funcionales como operativos. Según el general de división (r) Francisco Rosaleny y el capitán de navío (r) Francisco Romero de Paula, ambos asesores de Escribano, desde el punto de vista operativo y en el caso del Ejército de Tierra, la unidad que operase el enjambre debería ser de nivel brigada en Infantería y regimiento en el caso de la Caballería. También podría integrarse dentro del Mando de Artillería de Campaña. En el caso del Ejército del Aire, debería integrarse a nivel de Escuadrón y en el de la Armada, a nivel de Task Force/Task Group. No obstante, esto dependería exactamente de las capacidades específicas y las cargas de pago de los enjambres, ya que en función de si se configuran para misiones es ISR, ISTAR, de combate o una mezcla de todos ellos, el encaje debería ser diferente, al menos en opinión de nuestro colaborador, el coronel de caballería (r) Fernández Mateos. No olvidemos que cuando el Ejército se planteó la llegada de los primeros RPAS más allá del Raven y el PASI (Searcher Mk-IIJ), se produjo un importante debate en el seno de la institución acerca de si debían integrarse en Artillería o en Inteligencia y eso que, dado que no disponen de armamento y se centran en misiones ISTAR, la decisión es más sencilla. En el caso de LISS, sin embargo, será más compleja, precisamente por sus múltiples posibilidades.
El problema de fondo es que, al tratarse de un producto desarrollado por una empresa privada, por sobresaliente que este sea, no responde a una necesidad concreta, como la que puede recogerse en un documento de Requisitos de Estado Mayor. Eso, a pesar de que la DGAM ha tenido y tiene mucho que ver en el nacimiento del programa. En cualquier caso, el proceso que habrá de seguirse para su hipotética adopción será el contrario al habitual. Normalmente, son las FAS las que solicitan a las empresas que desarrollen una solución a sus problemas lanzando una Solicitud de Información o directamente un concurso. En este caso, LISS debe demostrar que puede cumplir con una serie de tareas mejor que los sistemas actualmente en uso y aunque las simulaciones apuntan a que así será en muchos casos, deberá enfrentarse a duras evaluaciones operativas antes de decidirse su adquisición, una vez esté completamente desarrollado.
La solución más factible pasa por la adquisición de un sistema para su evaluación, lo que ayudaría a desarrollar esas hipotéticas doctrinas y a valorar los posibles cambios orgánicos. De hecho, también cabe la posibilidad de que la empresa, que en esto tiene experiencia, llegue a ceder para esta función los equipos necesarios. Esta forma de actuar ya le ha dado interesantes resultados en el pasado. No hay más que recordar el caso de la Marina de Perú, a la que Escribano cedió equipos que posteriormente, tras demostrar sus virtudes en la práctica, se han convertido en un éxito.

Conclusiones
Si el programa LISS cumple con todo lo que promete sobre el papel, Escribano habrá logrado meter de lleno a España en el exclusivo club de países capaces de desarrollar tecnologías swarming realmente distribuidas por sus propios medios. Un club en el que apenas entran un puñado de países y ninguno de ellos miembro de la Unión Europea, pues el Reino Unido, único que ha lanzado proyectos comparables, ya no pertenece a la misma.
Las oportunidades de mercado, especialmente en el exterior, son enormes. Ahora bien, el camino no será fácil, pues son muchos los escollos a superar y necesitarán de una gran inversión, algo difícil de acometer, como hasta ahora, prácticamente en solitario. En este sentido, el papel de las instituciones españolas como clientes iniciales podría ser clave. También el de algunos potenciales clientes, especialmente de Oriente Medio.
Las posibilidades del programa son, al menos teóricamente, inmensas. Para materializarse, necesita todavía de numerosas pruebas -las próximas esperan llevarlas a cabo a partir del verano-, del desarrollo de una amplia variedad de cargas de pago -algunas de las cuales están bastante avanzadas- y de un correcto encaje tanto doctrinal como orgánico dentro de las FAS o de cualquier organismo que adopte este sistema. En la empresa se muestran confiados en superar todos estos y otros escollos que puedan presentarse y, aunque nunca puede saberse qué nos deparará el futuro, su trayectoria hasta la fecha es un aval.

Be the first to comment